
Why have different orientations and positions for same point clouds?
Hello
I would like to get the orientation and position od certain objects from point clouds. So, first I cropped the scene using the PCL CropBox filter like in PCL pcl::CropBox. Then used the PCL Moment of Inertia like in this PCL Tutorial link text. This is my code that compiles without errors. I include the whole point cloud scene and the cropped Box one pictures.
Here the C++ ROS code first
typedef pcl::PointXYZRGB PointC;
typedef pcl::PointCloud<pcl::PointXYZRGB> PointCloudC;
void cloud_cb (const sensor_msgs::PointCloud2& msg)
{
PointCloudC::Ptr cloud(new PointCloudC());
pcl::fromROSMsg(msg, *cloud);
//Crop Box
double min_x, min_y, min_z, max_x, max_y, max_z;
ros::param::param("crop_min_x", min_x, 0.6416);
ros::param::param("crop_min_y", min_y, -0.351);
ros::param::param("crop_min_z", min_z, -0.13453);
ros::param::param("crop_max_x", max_x, 0.97985);
ros::param::param("crop_max_y", max_y, -0.0371288);
ros::param::param("crop_max_z", max_z, 0.1379478);
Eigen::Vector4f min_pt(min_x, min_y, min_z, 1);
Eigen::Vector4f max_pt(max_x, max_y, max_z, 1);
pcl::CropBox<PointC> crop;
crop.setInputCloud(cloud);
crop.setMin(min_pt);
crop.setMax(max_pt);
PointCloudC::Ptr cropped_cloud(new PointCloudC());
crop.filter(*cropped_cloud);
sensor_msgs::PointCloud2 output;
pcl::toROSMsg(*cropped_cloud, output);
pub.publish(output);
//Moment of Inertia
pcl::MomentOfInertiaEstimation <pcl::PointXYZRGB> feature_extractor;
feature_extractor.setInputCloud (cropped_cloud);
feature_extractor.compute ();
std::vector <float> moment_of_inertia;
std::vector <float> eccentricity;
pcl::PointXYZRGB min_point_OBB;
pcl::PointXYZRGB max_point_OBB;
pcl::PointXYZRGB position_OBB;
Eigen::Matrix3f rotational_matrix_OBB;
float major_value, middle_value, minor_value;
Eigen::Vector3f major_vector, middle_vector, minor_vector;
Eigen::Vector3f mass_center;
feature_extractor.getMomentOfInertia (moment_of_inertia);
feature_extractor.getEccentricity (eccentricity);
feature_extractor.getOBB (min_point_OBB, max_point_OBB, position_OBB, rotational_matrix_OBB);
feature_extractor.getEigenValues (major_value, middle_value, minor_value);
feature_extractor.getEigenVectors (major_vector, middle_vector, minor_vector);
feature_extractor.getMassCenter (mass_center);
Eigen::Vector3f position (position_OBB.x, position_OBB.y, position_OBB.z);
Eigen::Quaternionf quat (rotational_matrix_OBB);
cout << " orientation x = " << quat.x() << endl;
cout << " orientation y = " << quat.y() << endl;
cout << " orientation z = " << quat.z() << endl;
cout << " orientation w = " << quat.w() << endl;
cout << " postion x = " << position_OBB.x << endl;
cout << " postion y = " << position_OBB.y << endl;
cout << " postion z = " << position_OBB.z << endl;
}
int main(int argc, char ** argv)
{
ros::init(argc, argv, "test_pcl_ros");
ros::NodeHandle nh;
ros::Subscriber sub = nh.subscribe("/zed/zed_node/point_cloud/cloud_registered", 10, cloud_cb);
pub = nh.advertise<sensor_msgs::PointCloud2> ("output", 10);
ros::spin();
}
Here the point cloud images.
First the whole scene. 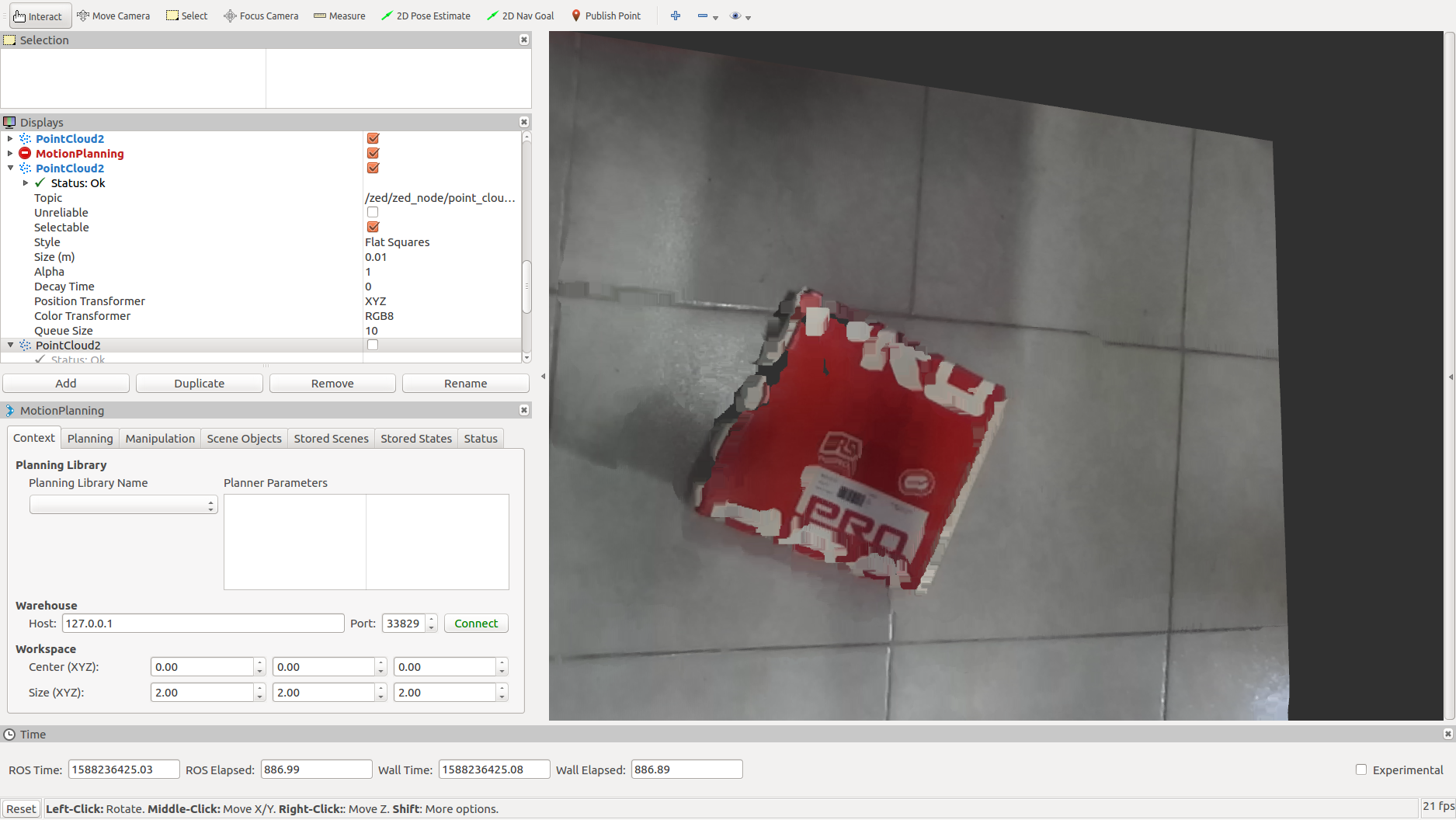 Then the cropped Box.
Then the cropped Box. 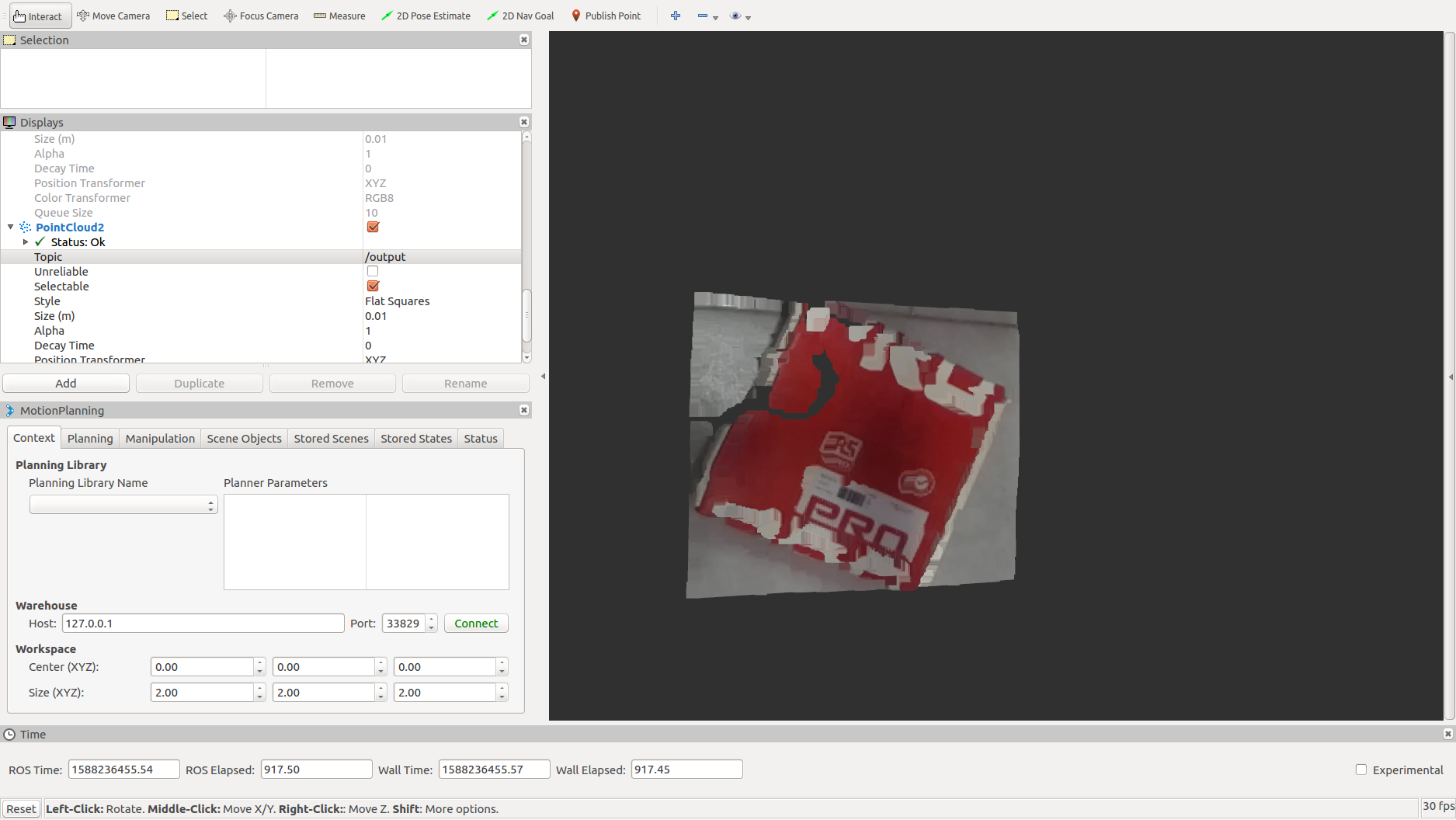 Here the output:
Here the output:
orientation x = -0.381498
orientation y = 0.378691
orientation z = 0.746498
orientation w = -0.392165
postion x = 0.73152
postion y = -0.175997
postion z = 0.00919689
orientation x = -0.385631
orientation y = 0.426972
orientation z = 0.682854
orientation w = -0.450215
postion x = 0.74303
postion y = -0.180681
postion z = 0.000638498
orientation x = -0.370232
orientation y = 0.333529
orientation z = 0.798585
orientation w = -0.337563
postion x = 0.730808
postion y = -0.171258
postion z = 0.0171869
orientation x = -0.377332
orientation y = -0.371774
orientation z = 0.397294
orientation w = 0.749374
Basically the orientation w change. But why?
Or should I do first planar ...

Those quaternions look like they are very close to 180 degrees away from each other. Moreover, your object seems to have quite a bit of symmetry. To me it seems quite possible that two of the eigenvalues and corresponding eigenvectors could have switched places.