
Getting only first scan while mapping using Slam_toolbox

I am trying to do mapping with the Slam Toolbox package and for that I am using laser scan dataset of the intel map . The dataset works fine with gmapping package . But while using slam toolbox with bag file it just shows the first laser scan on map topic on rviz . I have downloaded the intel lab map .clf file from here , and converted into the .bag file using this link.
Also for mapping , I am using online_sync.launch file in slamtoolbox package . And the configuration file for the node is same except the scan topic that I have changed to "/laser" . And also published the static tf for connection between tf frames . Earlier I also tried by changing directly the base frame to odom, but still the problem is same . It as as shown below :
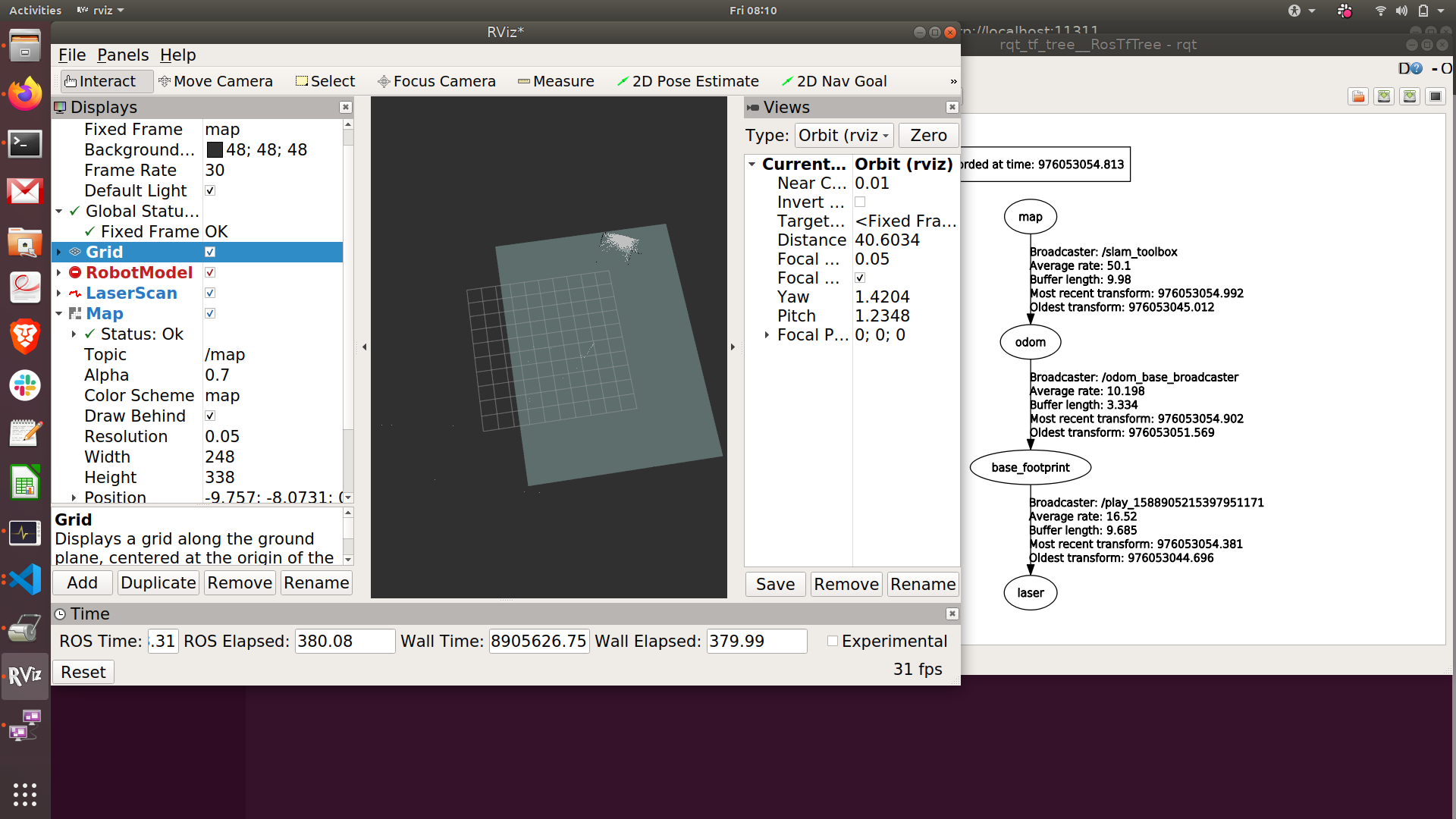
And getting the following same output :
[N=/slam_toolbox,F=MessageFilter<M>::add-398]: MessageFilter [target=odom ]: Added message in frame laser at time 976053183.299, count now 1
I have gone through the similar issues but , unable to solve this problem .
ROS version : ROS1 Ubuntu : 18.04
