
What is the round tip on the arm of the MoveIt! ?
Hi, everyone.
If you clone https://github.com/DENSORobot/denso_r... and run roslaunch denso_robot_moveit_config moveit_planning_execution.launch, you will get the following image.
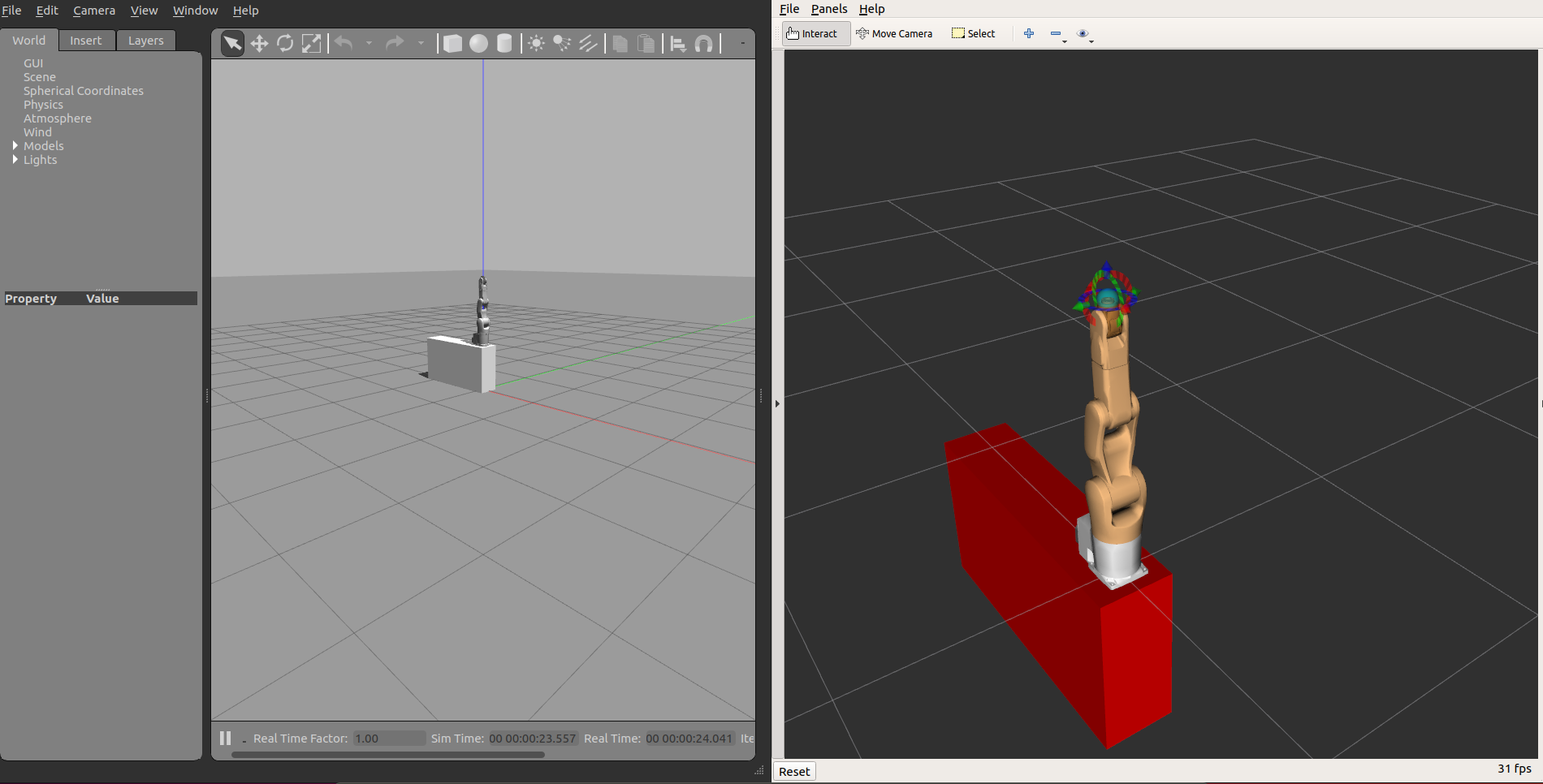
If you operate something on the end of the arm like this, you can also move it on Gazebo. How is this behavior accomplished?
Personally, I would like to realize that in denso_robot_descriptions/vs060_description/vs060.urdf, the robot name, the joint name, and the link name are appended with prefix so that the left and right can be distinguished.
It worked well without prefix, but not with prefix. This is despite the fact that the error warnings displayed on the device are the same.
Does anyone know how to realize?
Thank you very much.

Please attach your images directly to the question instead of linking to a google drive.
I've given you sufficient karma.