
Overlapping sdf model of kinova arm
I had the urdf model of Kinova Arm from https://github.com/sahandrez/jaco_con... here. I developed a Gazebo Plugin to control the KInova Arm from the Plugin. For that I needed the sdf file of Kinova Jaco, so I converted the urdf file to sdf file using this command gz sdf -p /j2s7s300.urdf.urdf > /KinovaJaco.sdf. However I get an overlapped sdf file of the kinova Jaco. I am a newbie in this. Can someone help me getting a well configured SDF file of the Arm? Also, why is this overlapping problem occuring because when I launch the urdf file with ROS, it appears perfectly fine.
This is my sdf file
<?xml version="1.0"?>
<sdf version='1.4'>
<model name='KinovaJaco'>
<static>true</static>
<pose>0 0 0 0 0 0</pose>
<link name='root'>
<pose>0 0 0.0000 0.0000 0.00000 0.0000</pose>
<inertial>
<pose>0 0 0 0 -0 0</pose>
<!-- <mass>0.46784</mass> -->
<inertia>
<ixx>0.400</ixx>
<ixy>0.5</ixy>
<ixz>0.8</ixz>
<iyy>0.4</iyy>
<iyz>0.9</iyz>
<izz>0.200</izz>
</inertia>
<mass>0.46784</mass>
</inertial>
<collision name='base_link'>
<pose>0 0 0 0 -0 0</pose>
<geometry>
<mesh>
<scale>1 1 1</scale>
<uri>model://kinovaJaco/meshes/base.STL</uri>
</mesh>
</geometry>
</collision>
<visual name='root_fixed_joint_lump__Kinova_link_base_visual_1'>
<pose>0 0.5 0.6 0 -0 0</pose>
<geometry>
<mesh>
<scale>1 1 1</scale>
<uri>model://kinovaJaco/meshes/base.STL</uri>
</mesh>
</geometry>
</visual>
</link>
<link name='Kinova_link_1'>
<pose>0 0 0.15675 3.14159 -0 3.14159</pose>
<inertial>
<pose>0 -0.002 -0.0605 0 -0 0</pose>
<mass>0.7477</mass>
<inertia>
<ixx>0.00152032</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.00152032</iyy>
<iyz>0</iyz>
<izz>0.00059816</izz>
</inertia>
</inertial>
<collision name='Kinova_link_1_collision'>
<pose>0 0 0 0 -0 0</pose>
<geometry>
<mesh>
<scale>1 1 1</scale>
<uri>model://kinovaJaco/meshes/shoulder.STL</uri>
</mesh>
</geometry>
</collision>
<visual name='Kinova_link_1_visual'>
<pose>0 0 0 0 -0 0</pose>
<geometry>
<mesh>
<scale>1 1 1</scale>
<uri>model://kinovaJaco/meshes/shoulder.STL</uri>
</mesh>
</geometry>
</visual>
<visual name='Kinova_link_1_visual_1'>
<pose>0 0 0 0 -0 0</pose>
<geometry>
<mesh>
<scale>1 1 1</scale>
<uri>model://kinovaJaco/meshes/ring_big.STL</uri>
</mesh>
</geometry>
</visual>
</link>
<joint name='Kinova_joint_1' type='revolute'>
<child>Kinova_link_1</child>
<parent>root</parent>
<axis>
<xyz>-0 0 -1</xyz>
<limit>
<lower>-1e+16</lower>
<upper>1e+16</upper>
</limit>
<dynamics>
<damping>0.2</damping>
<friction>0</friction>
<spring_reference>0</spring_reference>
<spring_stiffness>0</spring_stiffness>
</dynamics>
<use_parent_model_frame>1</use_parent_model_frame>
</axis>
</joint>
<link name='Kinova_link_2'>
<pose>0 0.0016 0.2755 1.5708 0 -0</pose>
<inertial>
<pose>0 -0.103563 0 0 -0 0</pose>
<mass>0.8447</mass>
<inertia>
<ixx>0.00247074</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.000380115</iyy>
<iyz>0</iyz>
<izz>0.00247074</izz>
</inertia>
</inertial>
<collision name='Kinova_link_2_collision'>
<pose>0 0 0 0 -0 0</pose>
<geometry>
<mesh>
<scale>1 1 1</scale>
<uri>model://kinovaJaco/meshes ...
you do now, so please attach your image directly.
Also: please ask questions about SDF on the Gazebo Answers site, as that is where they prefer to have users ask questions.
Hey thank You @gvdhoorn. I will ask in the gazebo answers site. Was unable to access my account there. Surely, will try again
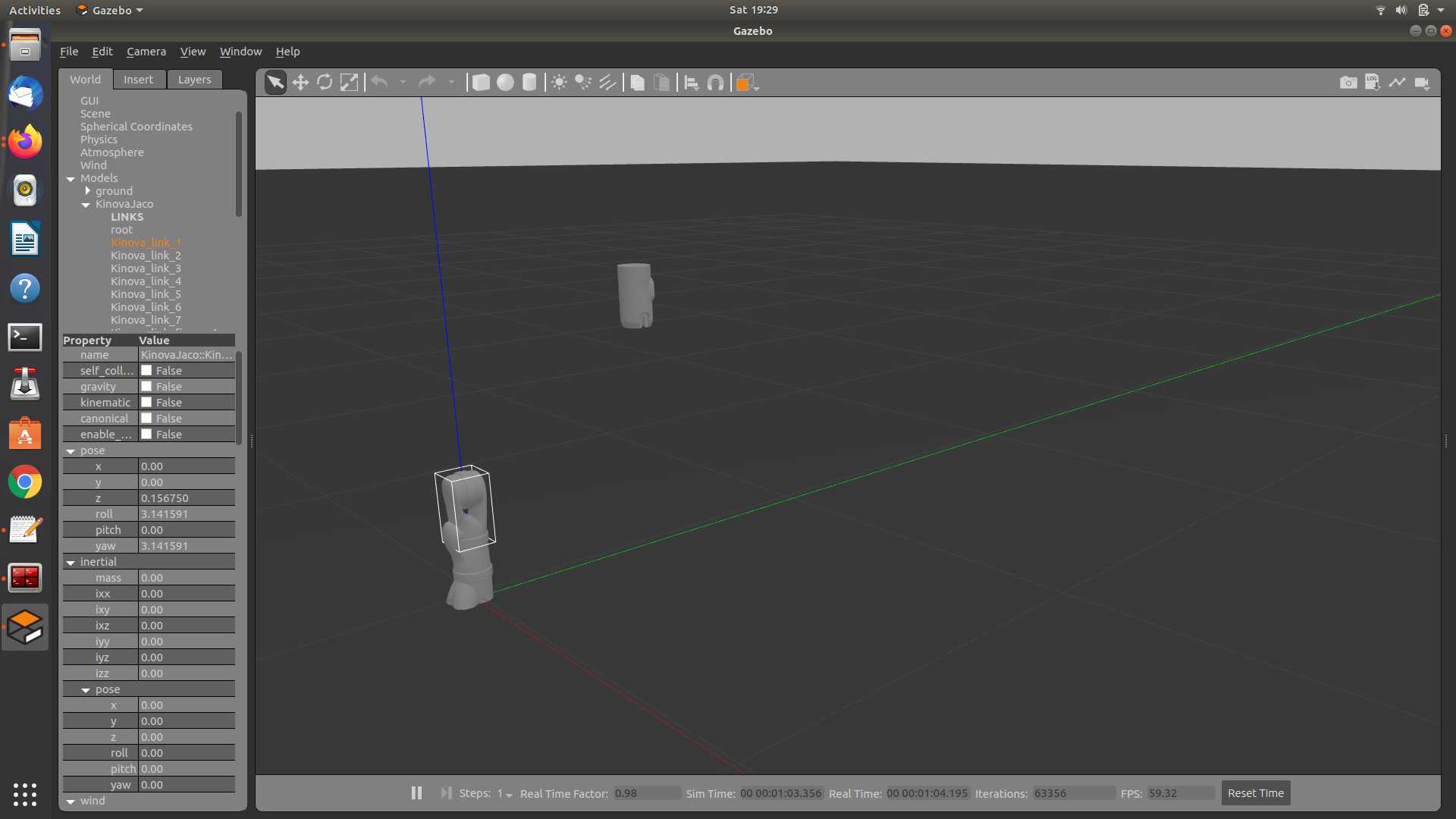
I did figure out one thing that when we change the <static>true</static> to false the overlapping gets resolved. But what does static imply here? The problem still persists as in the arm alignment is still clumsy and pretty abnormal. I am also unable to change the orientation of the root pose in the sdf file. When, I change the pose in the sdf file the changes aren't getting reflected in the gazebo, don't know why? Currently my kinova arm is lying, I somehow wanted to bring it in a standing home position. Can someone help?C:\fakepath\Screenshot from 2020-06-15 19-41-10.png