
TF with unknown publisher
What might cause a TF to have an "unknown publisher?" I am seeing an inability to show /scan within rviz with this error. I have checked and double checked everything I know how to and I can't find it. I really could use a little help troubleshooting this! Thanks,
More details
When roscore is started on the robot as a biproduct of roslaunch this warning flies by. Could it be relevant?
[ WARN] [1594689587.480382535]: The root link base_link has an inertia specified in the URDF, but KDL does not support a root link with an inertia. As a workaround, you can add an extra dummy link to your URDF.
Original background info
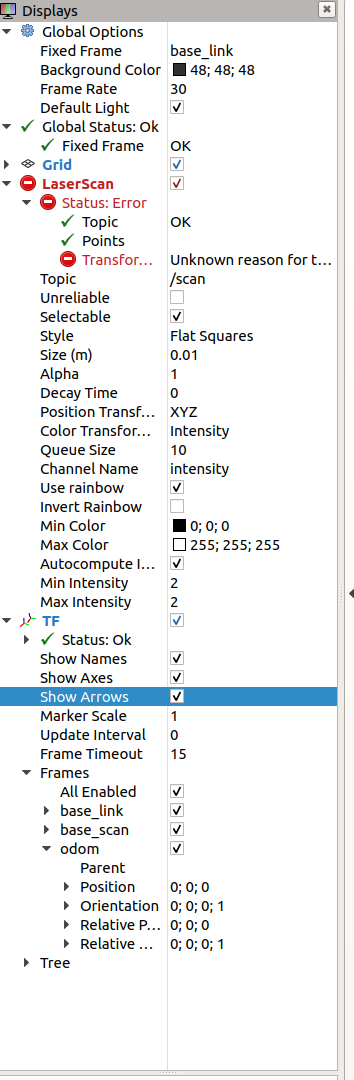
I see this error in rviz when I setup fixed frame to be odom and laser_scan to be /scan:
Transform [sender=unknown_publisher]
Unknown reason for transform failure
Here's information about the transform:
Chain is: base_link -> odom
Net delay avg = 0.0192853: max = 0.156318
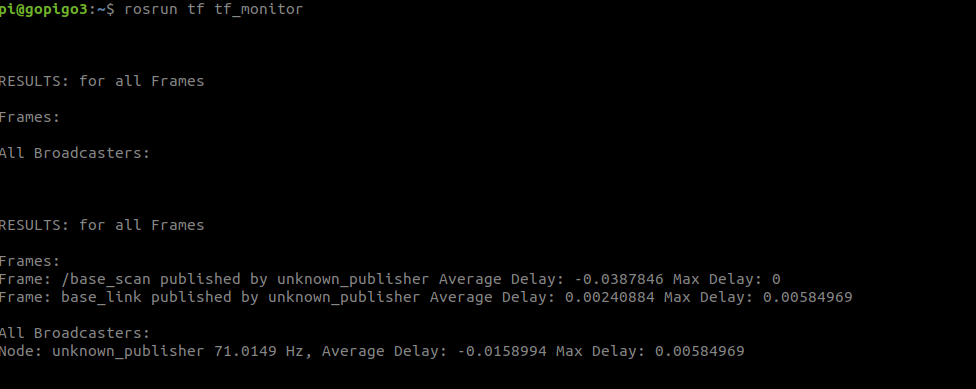
Frames:
Frame: base_link published by unknown_publisher Average Delay: -0.0030077 Max Delay: 0
All Broadcasters:
Node: unknown_publisher 55.824 Hz, Average Delay: -0.021014 Max Delay: 0
Additional Details
Rviz is failing to find a mapping between /odom and /base_scan for a similar reason:
And yet, the tf tree looks ok:
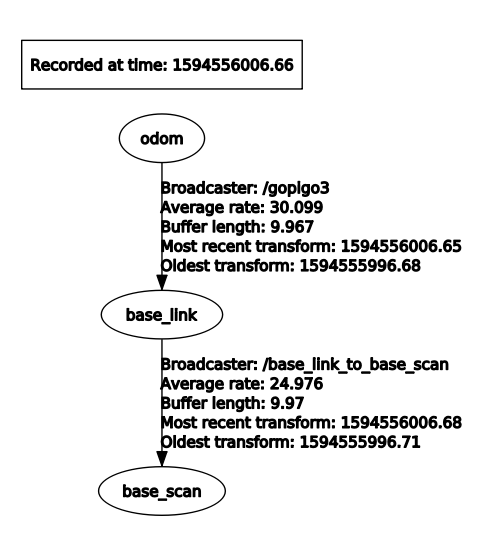
And other than the "unknown publisher" the tfs seem ok:
and

You seem to be using
tf_monitor, I think it might be bugged because if I use it I also get "unknown publisher" but if I userqt_tf_treethe broadcasters are correctly identified. Alsoroswtfdoesn't complain. Try those other debugging tool to see if there is really something bad happening.I've done a lot more debugging, and fixed a couple of problems but this particular symptom is still happening. See additional details above please.
Did anyone solved it?