
Universal Robot Arms, size changes in the robot description
I am trying to update warthog description, by attaching three universal robot arms(2 UR5, 1 UR3). I am following the second approach pointed here. I was succesfull in adding all the robot descriptions needed. But UR arm breaks which actually is included later. In the following example:
<xacro:include filename="$(find mbs_description)/urdf/accessories/arms/right_ur_arm.urdf.xacro" />
<xacro:if value="$(optenv WARTHOG_RIGHT_ARM 0)">
<joint name="right_arm_joint" type="fixed">
<origin xyz="0 0 -0.025" rpy="0 0 0" />
<parent link="right_arm_mount_link"/>
<child link="right_arm/base_link" />
</joint>
</xacro:if>
<xacro:include filename="$(find mbs_description)/urdf/accessories/arms/left_ur_arm.urdf.xacro" />
<xacro:if value="$(optenv WARTHOG_LEFT_ARM 0)">
<joint name="left_arm_joint" type="fixed">
<origin xyz="0 0 -0.025" rpy="0 0 0" />
<parent link="left_arm_mount_link"/>
<child link="left_arm/base_link" />
</joint>
</xacro:if>
<xacro:include filename="$(find mbs_description)/urdf/accessories/arms/center_ur_arm.urdf.xacro" />
<xacro:if value="$(optenv WARTHOG_CENTER_ARM 0)">
<joint name="center_arm_joint" type="fixed">
<origin xyz="0 0 -0.025" rpy="0 0 3.1415" />
<parent link="center_arm_mount_link"/>
<child link="center_arm/base_link" />
</joint>
</xacro:if>
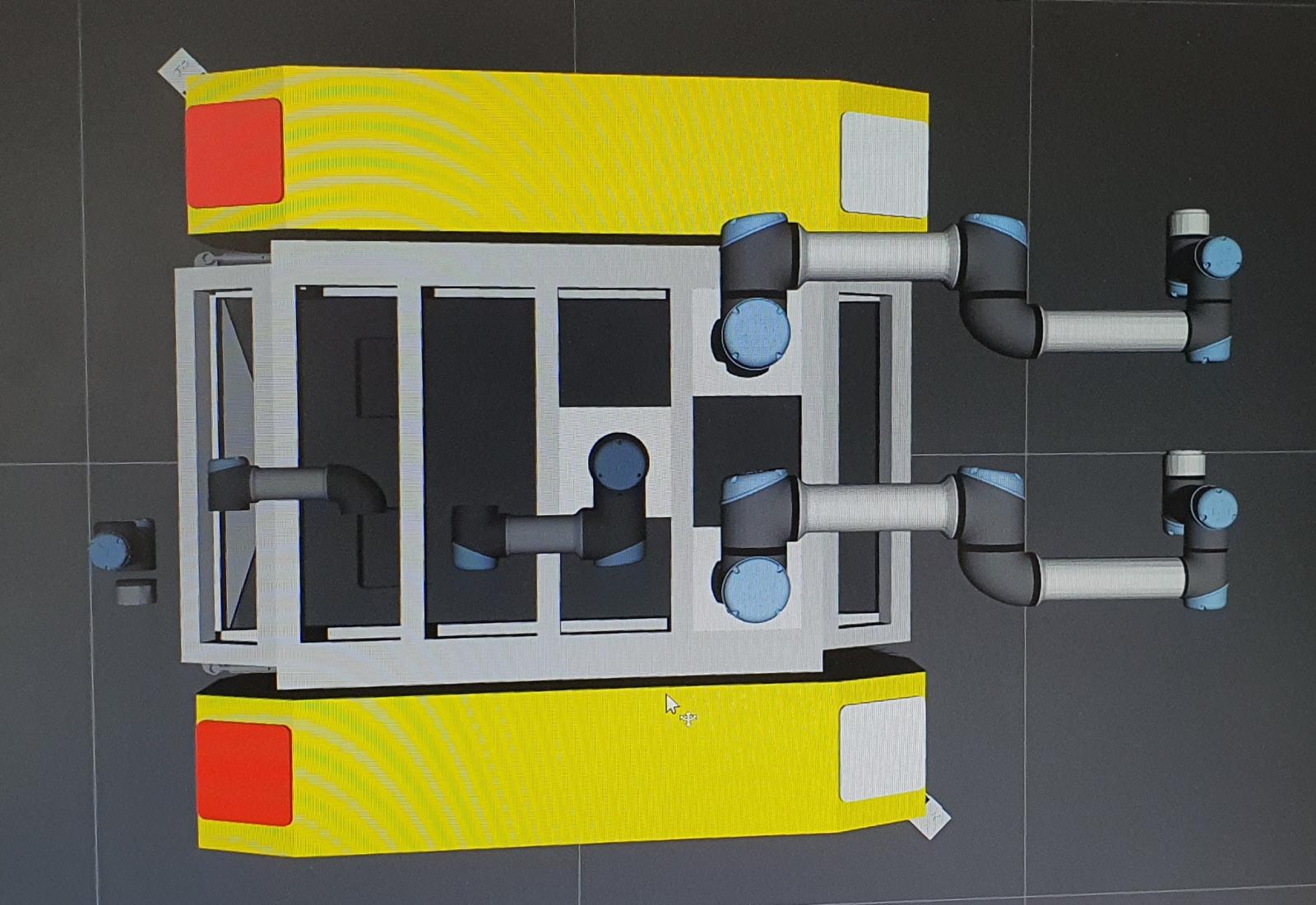
Here I have added right and left (both UR5e) and than center(UR3), so the arm in the center breaks its joints and goes to the length of UR5e.
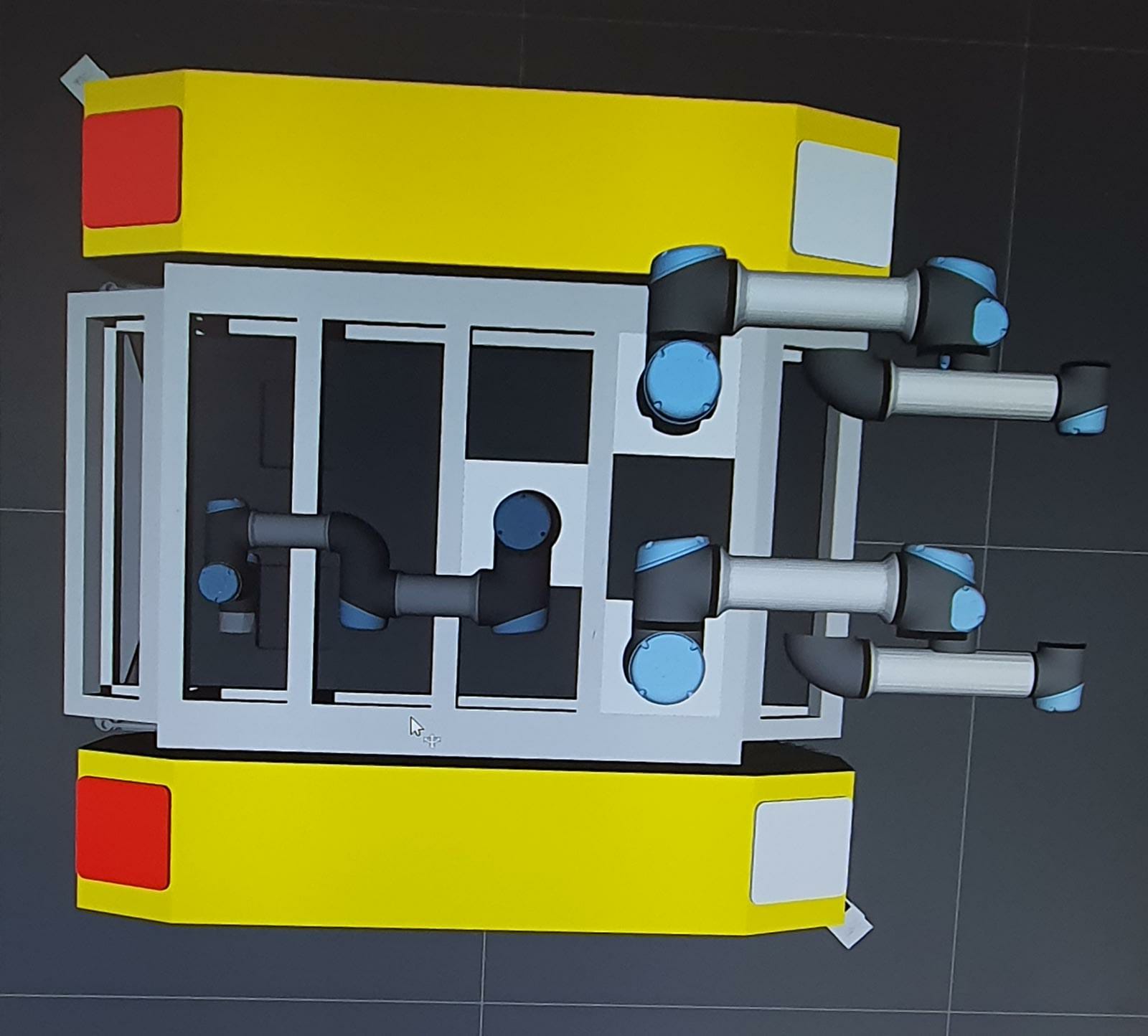
And if I take the center arm at the top like here:
<xacro:include filename="$(find mbs_description)/urdf/accessories/arms/center_ur_arm.urdf.xacro" />
<xacro:if value="$(optenv WARTHOG_CENTER_ARM 0)">
<joint name="center_arm_joint" type="fixed">
<origin xyz="0 0 -0.025" rpy="0 0 3.1415" />
<parent link="center_arm_mount_link"/>
<child link="center_arm/base_link" />
</joint>
</xacro:if>
<xacro:include filename="$(find mbs_description)/urdf/accessories/arms/right_ur_arm.urdf.xacro" />
<xacro:if value="$(optenv WARTHOG_RIGHT_ARM 0)">
<joint name="right_arm_joint" type="fixed">
<origin xyz="0 0 -0.025" rpy="0 0 0" />
<parent link="right_arm_mount_link"/>
<child link="right_arm/base_link" />
</joint>
</xacro:if>
<xacro:include filename="$(find mbs_description)/urdf/accessories/arms/left_ur_arm.urdf.xacro" />
<xacro:if value="$(optenv WARTHOG_LEFT_ARM 0)">
<joint name="left_arm_joint" type="fixed">
<origin xyz="0 0 -0.025" rpy="0 0 0" />
<parent link="left_arm_mount_link"/>
<child link="left_arm/base_link" />
</joint>
</xacro:if>
Now center arm will be fine but both right and left will shrink to the length of center arm i.e. UR3.
I am not able to sort out this issue, can anyone have an insight on the problem.
Note:
The robot descriptions UR5e and UR3 are the same as on the official supported repo
Note: The same issue is raised on Warthog's github and Universal Robot's repo repo as currently I don't know where the problem could be.

{kind=link}
{kind=link}
Finally: please refrain from cross-posting to three different places at the same time.
As evidenced by your post on the CP tracker, this leads to split discussions and potentially wasted effort.