
Using tf to transform a point
Hello,
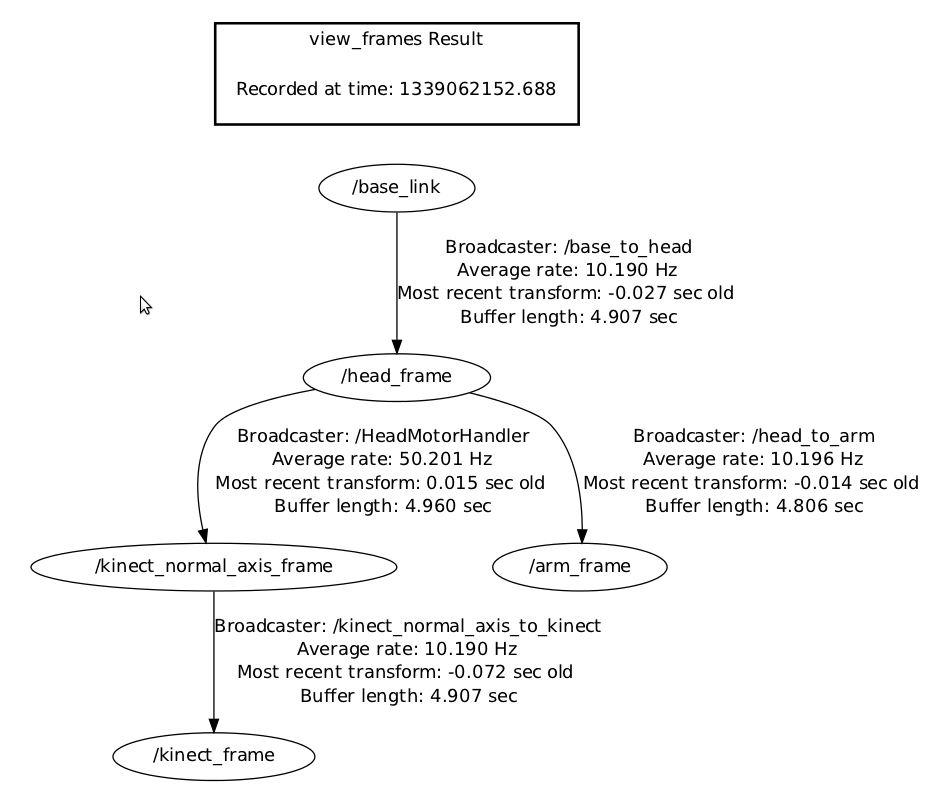
I am trying to transform a point from one frame (/kinect_frame) to another (/base_link).
This is the pdf I get from 'rosrun tf view_frames' :
but still when I try to transform my point using a tf::TransformListener and tf::TransformListener::transformPoint like this :
mTransformListener.transformPoint("/base_link", qc.response.points[0], result);
I get the following error :
[ERROR] [1339062545.681343977]: Unable to lookup transform, cache is empty, when looking up transform from frame [/kinect_frame] to frame [/base_link]
But there is a link visible between kinect_frame and base_link, what am I doing wrong ?
add a comment

