
robot_localization doesn't publish odom when only using gps and imu-data.
I'm trying to use robot_localization in order to fuse IMU and GPS data to obtain odometry information (I'm aware of GPS may not provide discrete data which may lead to jumps). My system has the following setup:
- ROS Melodic on Ubuntu 18.04
- robot_localization
- GNSS-sensor (sensor_msgs/NavSatFix) -> refers to "gps"-frame
- Magnetometer-IMU (sensor_msgs/Imu) with NED-convention (i guess), meaning 0° is north and it increases counter-clockwise -> refers to "imu_link"-frame
I'm trying to use a combination of ekf_localization_node and navsat_transform_node with the configuration below. Since I want to use a 2D-localization, I only need the x- and y-localization based on the gps-data fused with the yaw-angle based on the imu-data.
ekf_odom.launch:
<?xml version="1.0"?> <launch>
<node pkg="tf2_ros" type="static_transform_publisher" name="bl_to_imu"
args="0 0 0 0 0 0 1 base_link imu_link" />
<node pkg="tf2_ros" type="static_transform_publisher" name="bl_to_gps"
args="0 0 0 0 0 0 1 base_link gps" />
<node pkg="robot_localization" type="ekf_localization_node" name="ekf_localization"
clear_params="true">
<param name="frequency" value="20"/>
<param name="sensor_timeout" value="0.1"/>
<param name="two_d_mode" value="true"/>
<param name="odom_frame" value="odom"/>
<param name="base_link_frame" value="base_link"/>
<param name="world_frame" value="odom"/>
<param name="transform_time_offset" value="0.0"/>
<param name="odom0" value="/odometry/gps"/>
<param name="imu0" value="/imu/data"/>
<rosparam param="odom0_config">[true, true, false,
false, false, false,
false, false, false,
false, false, false,
false, false, false]</rosparam>
<rosparam param="imu0_config">[false, false, false,
false, false, true,
false, false, false,
false, false, true,
false, false, false]</rosparam>
<param name="odom0_differential" value="false"/>
<param name="imu0_differential" value="true"/>
<param name="odom0_relative" value="false"/>
<param name="imu0_relative" value="false"/>
<param name="print_diagnostics" value="true"/>
<param name="odom0_queue_size" value="10"/>
<param name="imu0_queue_size" value="10"/>
</node>
<node pkg="robot_localization" type="navsat_transform_node" name="navsat_transform" respawn="true" output="screen">
<param name="frequency" value="20"/>
<param name="delay" value="3"/>
<param name="magnetic_declination_radians" value="0"/>
<param name="yaw_offset" value="1.570796327"/>
<param name="zero_altitude" value="true"/>
<param name="broadcast_cartesian_transform" value="true"/>
<param name="publish_filtered_gps" value="false"/>
<param name="use_odometry_yaw" value="false"/>
<remap from="imu/data" to="/imu/data" />
<remap from="gps/fix" to="/ublox_node/fix" />
<remap from="/odometry/filtered" to="/odometry/filtered" />
<remap from="/odometry/gps" to="/odometry/gps"/>
</node>
</launch>
The code is based on this tutorial.
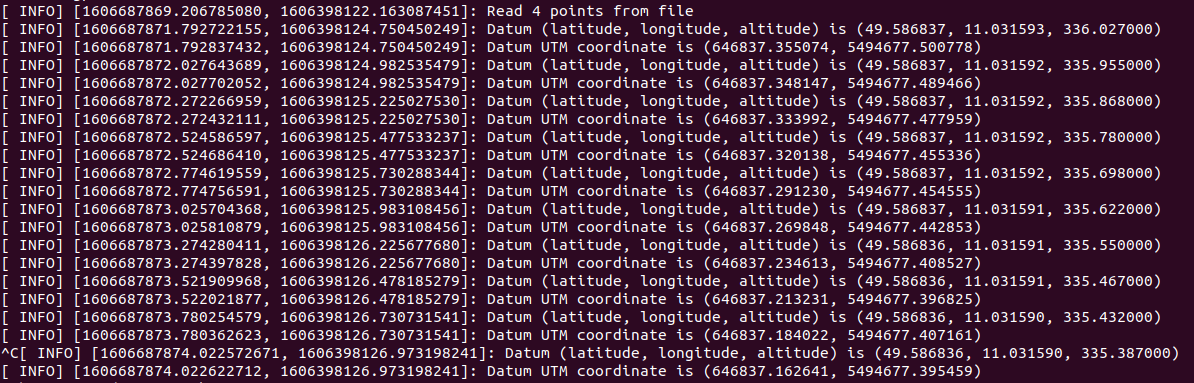
When starting the system, navsat_transform_node appears to receive the gnss-data (see terminal-output below):
Since it appeared to be a common issue in related posts that several frames weren't defined, here's my tf-tree when running the system:
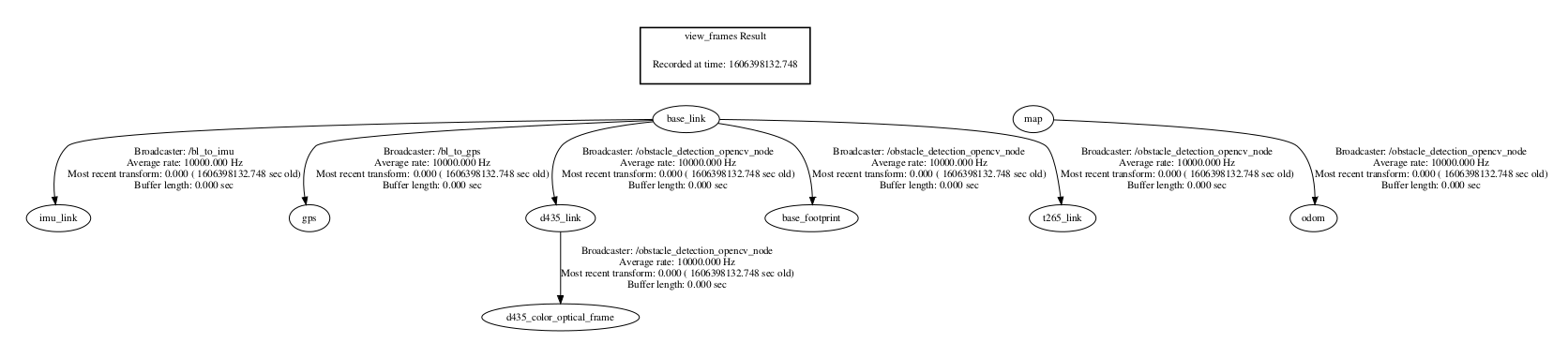
As you can see, ekf_localization_node doesn't generate the transform between odom and base_link. Furthermore, neither odom/filtered nor odom/gps publish any data. I've had a look at several related issues and therefore made sure that all relevant frames exist and are ...
