
How to force the robot to avoid restricted area.
Hi,
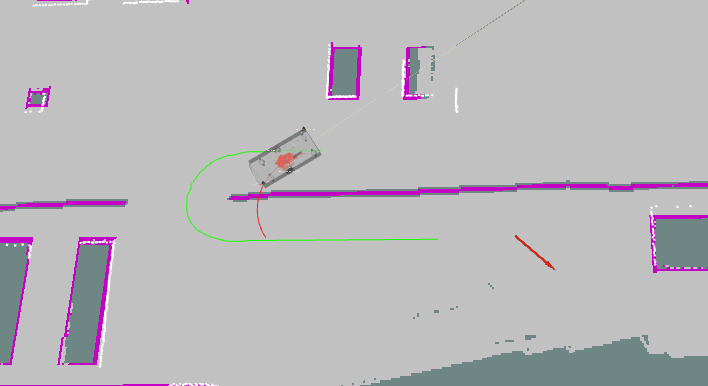
I've edited the map by GIMP to add kind of obstacles to force the robot to take a specific path before achieving the goal even if there is free space, but as we can see from the photo, the global planner (green line) is calculating the right path while the robot goes across the borders(added lines), anyone have a solution for such problem ?
Thanks
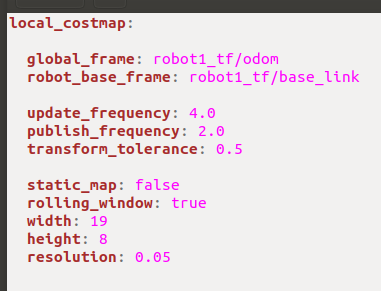
Here is local costmap conf:
Move_base node in move_base.launch


This most probably has to do with your costmap setup. Probably the local costmap is overwriting the global costmap. Please edit your question and add the relevant costmap launch and configuration files.
Hi, I've edited my question with required infos.
I asked a similar question a couple years ago. Take a look at the answers. I never circled back to finish the project but it is still on my list of things to do. https://answers.ros.org/question/2944...
please post code as text, not as images. Images are not searchable. Also, we'd need your full configuration, not only the local part. Add the
costmap_common_params.yamlas well.is there any update or improment about it? I have the same issue.