
3D mapping using Octomap with Turtlebot

Hi, (ROS - Electric; Ubuntu 11.04) This is in continuation to the question. I am trying to build a 3D occupancy map using the octomap_server with kinect sensor on top of the turtlebot. Following are the launch files i ran
roslaunch turtlebot_bringup minimal.launch
roslaunch turtlebot_navigation gmapping_demo.launch
Turtlebot navigation package launches the /turtlebot_bringup/kinect.launch which has the throttling and fake laser for 2D mapping and localization purposes.
Now i try to run the
roslaunch octomap_server octomap_mapping.launch
I have modified the cloud_in and frame_id as given below
<launch>
<node pkg="octomap_server" type="octomap_server_node" name="octomap_server">
<param name="resolution" value="0.05" />
<!-- fixed map frame (set to 'map' if SLAM or localization running!) -->
<param name="frame_id" type="string" value="/map" />
<!-- maximum range to integrate (speedup!) -->
<param name="max_sensor_range" value="3.0" />
<!-- data source to integrate (PointCloud2) -->
<remap from="cloud_in" to="/camera/depth/points" />
</node>
</launch>
But the occupied_cells_vis_array topic gets the marker_array in the camera_depth_frame which is orthogonal to the actual kinect frame where the fake laser is being published. Hence i changed the frame using
<param name="frame_id" type="string" value="/camera_depth_optical_frame" />
to get it to the frame of actual kinect.
But this leads to the Map being build to be orthogonal to the kinect frame. The resulting image is attached 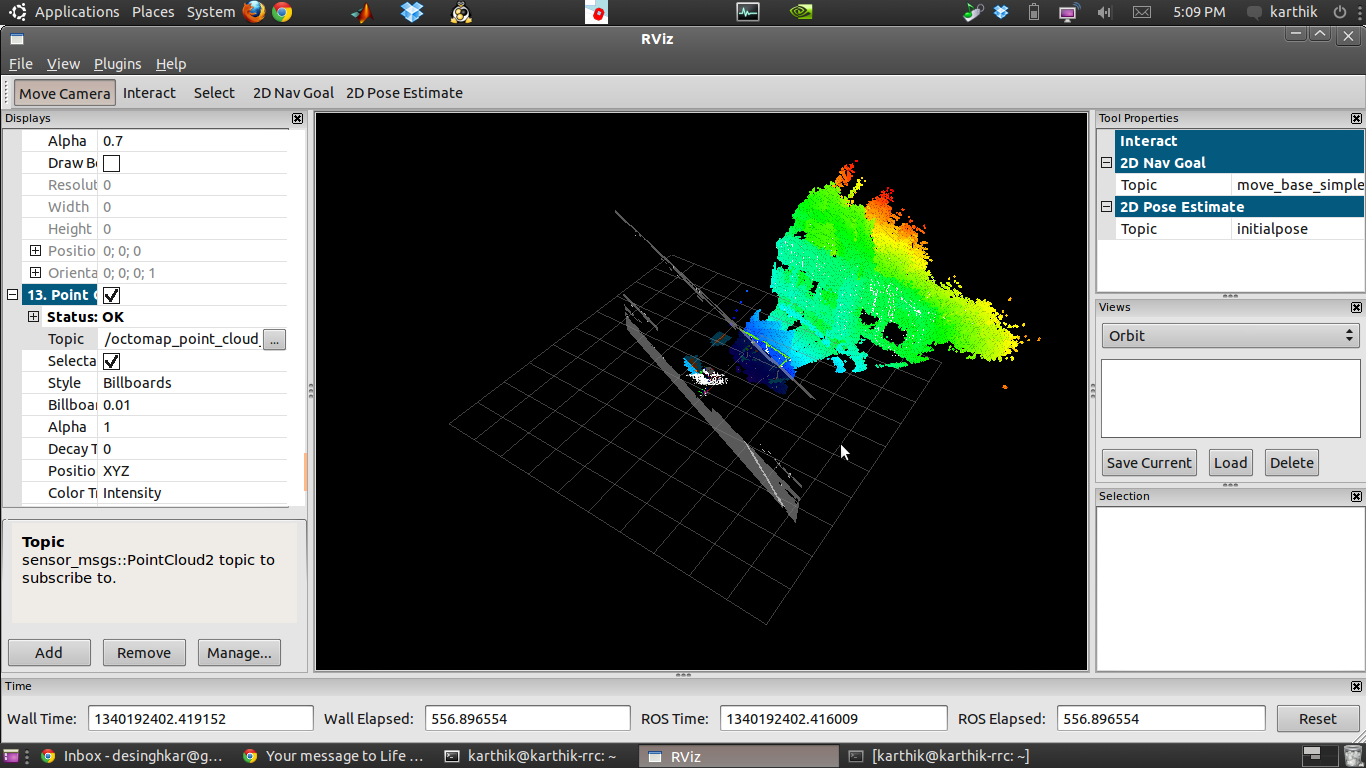 .
.
I am sure that the gmapping is able to convert the camera_depth_optical_frame of the kinect to camera_depth_frame internally and creates the Map correctly. But when octomap_server is run this Map is again reframed. Please help me to resolve this issue.
