
Rviz stops slam_gmapping + weird laser scan [closed]

Hello,
Every time that I launch Rviz, my map builder slam_gmapping is killed and I get the following error:
[slam_gmapping-1] process has died [pid 3157, exit code -7, cmd /opt/ros/melodic/lib/gmapping/slam_gmapping /scan:=/robot/laser_scan/scan __name:=slam_gmapping __log:=/home/benjamin/.ros/log/e41c5046-5af8-11eb-9a5c-0433c2273ac6/slam_gmapping-1.log].
log file: /home/benjamin/.ros/log/e41c5046-5af8-11eb-9a5c-0433c2273ac6/slam_gmapping-1*.log
Here is my rviz launch file, I'm also launching join_state_publisher and robot_state_publisher within it:
<?xml version="1.0"?>
<launch>
<param name="robot_description" command="$(find xacro)xacro.py '$(find eurobot_description)/urdf/robot.xacro'"/>
<!-- send fake joint values -->
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher">
<param name="use_gui" value="False"/>
</node>
<!-- Combine joint values -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher">
<param name="robot_description" value="$(find eurobot_description)/urdf/robot.xacro'"/>
</node
<!-- Show in Rviz -->
<node name="rviz" pkg="rviz" type="rviz" required="true" args="-d $(find eurobot_description)/rviz/xacro_viewer.rviz"/>
</launch>
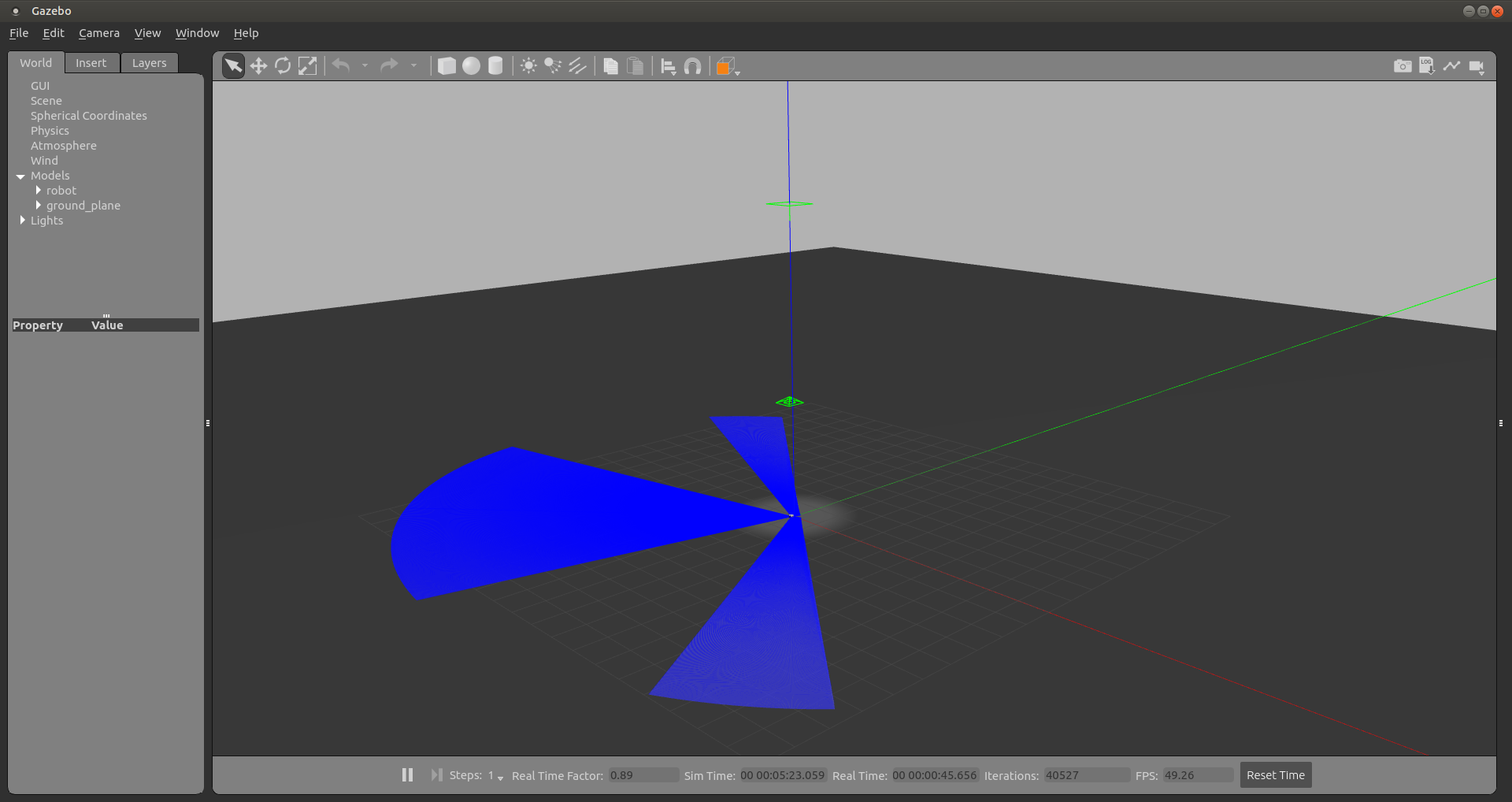
Slam_gmapping is properly set to receive laser scan so as my base frame. Could it be related to my problem with my lidar (see picture below) where at the back of the robot it makes a straight line.
Thank you for your time and happy new year !

Done. Sorry I can't find the log file
log file:
/home/benjamin/.ros/log/e41c5046-5af8-11eb-9a5c-0433c2273ac6/slam_gmapping-1*.logI've got
slam_gmapping-1-stdout.logbut it's an empty file