
message_filters in C++ not subscribing to topics when implemented in a class
Hi all, I am having some issues with message filters, but I am not sure if I am doing something wrong or if there is a bug somewhere.
After some difficulties, I decided to implement a couple of minimal examples to describe the problem.
So, the toy example is very simple, I have a publisher node that publishes on two topics (topic1 and topic2) a custom-defined IntStamped message. They have exactly the same timestamp, so there are no issues in the generated messages.
Then, I have implemented two C++ nodes using message_filters, the first one wraps everything in a class, while the second doesn't.
Here are the nodes.
Whit the classes:
#include "message_filters/subscriber.h"
#include "message_filters/time_synchronizer.h"
#include "boundingbox_msg/msg/int_stamped.hpp"
using namespace message_filters;
using std::placeholders::_1;
using std::placeholders::_2;
class MinimalSyncClass : public rclcpp::Node {
public:
MinimalSyncClass() : Node("minimal_sync_class") {
Subscriber<boundingbox_msg::msg::IntStamped> sub1(this, "topic1");
Subscriber<boundingbox_msg::msg::IntStamped> sub2(this, "topic2");
TimeSynchronizer<boundingbox_msg::msg::IntStamped, boundingbox_msg::msg::IntStamped> sync(
sub1,
sub2,
10);
sync.registerCallback(std::bind(&MinimalSyncClass::callback, this,
std::placeholders::_1,
std::placeholders::_2));
RCLCPP_INFO_STREAM(this->get_logger(), "Init complete");
}
private:
void callback(
const boundingbox_msg::msg::IntStamped::ConstSharedPtr& msg1,
const boundingbox_msg::msg::IntStamped::ConstSharedPtr& msg2) const {
RCLCPP_INFO_STREAM(this->get_logger(), "Result: "<<msg1->value + msg2->value );
}
};
int main(int argc, char *argv[]) {
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared<MinimalSyncClass>());
rclcpp::shutdown();
return 0;
}
And this one without the class:
#include "message_filters/subscriber.h"
#include "message_filters/time_synchronizer.h"
#include "boundingbox_msg/msg/int_stamped.hpp"
using namespace message_filters;
using std::placeholders::_1;
using std::placeholders::_2;
void callback(
const boundingbox_msg::msg::IntStamped::ConstSharedPtr& msg1,
const boundingbox_msg::msg::IntStamped::ConstSharedPtr& msg2) {
RCLCPP_INFO_STREAM(rclcpp::get_logger("minimal_sync"), "Result: "<<msg1->value + msg2->value );
}
int main(int argc, char** argv)
{
rclcpp::init(argc, argv);
auto nh = std::make_shared<rclcpp::Node>("minimal_sync");
Subscriber<boundingbox_msg::msg::IntStamped> sub1(nh.get(), "topic1");
Subscriber<boundingbox_msg::msg::IntStamped> sub2(nh.get(), "topic2");
TimeSynchronizer<
boundingbox_msg::msg::IntStamped,
boundingbox_msg::msg::IntStamped> sync(sub1, sub2, 10);
sync.registerCallback(std::bind(&callback, _1, _2));
RCLCPP_INFO(rclcpp::get_logger("minimal_sync"), "Init" );
rclcpp::spin(nh);
return 0;
}
If I run all the three nodes together, this is the result in rqt_graph:
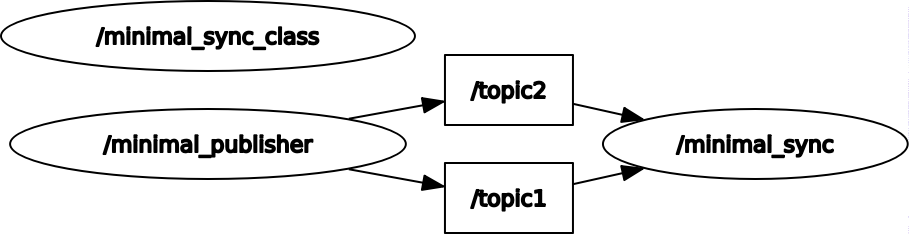
As you can see, the one without the class is connected to the topics and it is working properly, while the other with the class it's completely disconnected.
I am honestly lost, and can't figure out where the problem is.
