
Quaternion wrong orientation
I have a binpick application with robot arm and a fixed camera. The camera does it's vision stuff and sends the robot pickpose as a quaternion to the robot, This is done using a static tf between the robot_base and camera_base.
The position(x,y,z) is correct, and the angles is correct, I only want the robot positioned from above:
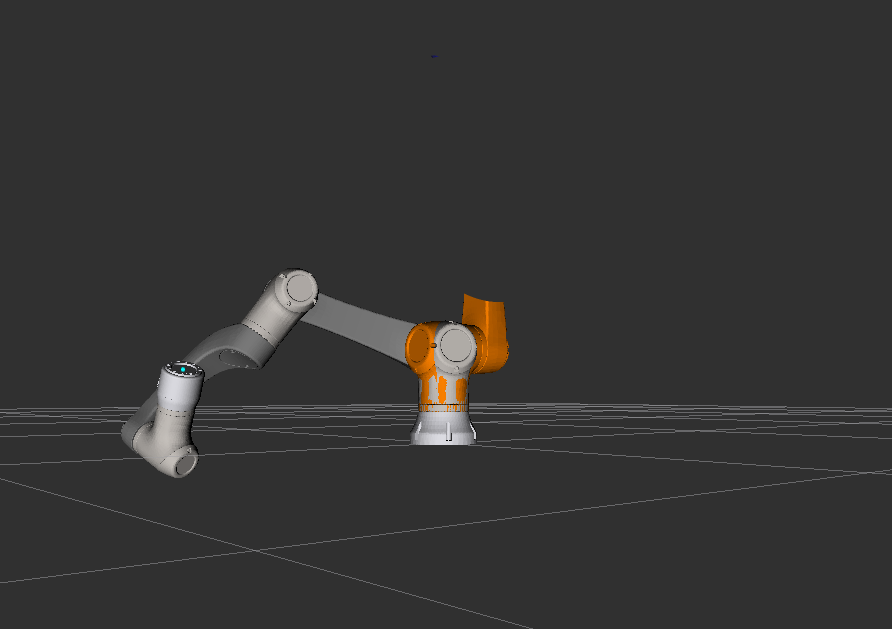
I don't have a lot of experience with TF, and it looks like my problem is there. Another solution is to 'invert' the quaternion.
Anyone who can point me in the right direction?
Solution:
The answer of @fvd solved my problem, I used rotate_pose_by_rpy(..):
pose_goal = rotate_pose_by_rpy(pose_goal, pi, 0, 0)
This results in the following pose:
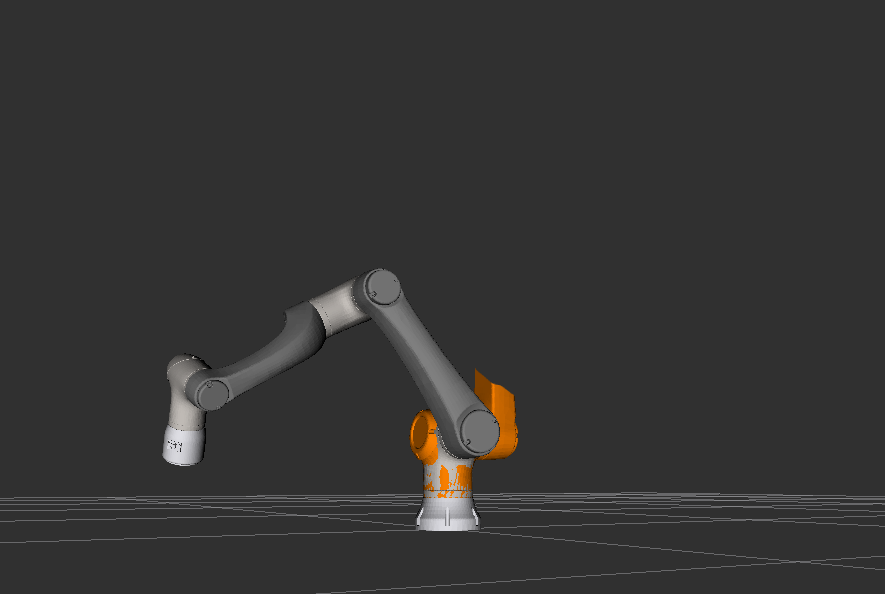
add a comment
