
Planning option for move_group.plan()
Hi all,
I have 2 questions:
- I defined the goal for my robot as
current_pose.position.x = current_pose.position.x -0.1;and tried to generated motion withmove_group.plan()by usingmove_group.setPoseTarget(current_pose);. On the other hand, I just gave the same goal position to my TracIk. As the images show, the both ways lead the robot to the goal position, but the resulted movement frommove_group.plan()seems rather not efficient. Is there something like solve_type formove_group.plan()that one uses in kinematics.yaml? - Using
move_group.computeCartesianPath()I can generate similar movement as with TracIk. In general, when would you prefer usingmove_group.computeCartesianPath()overmove_group.plan()? And when would you usemove_group.plan()?
Result from move_group.plan(): 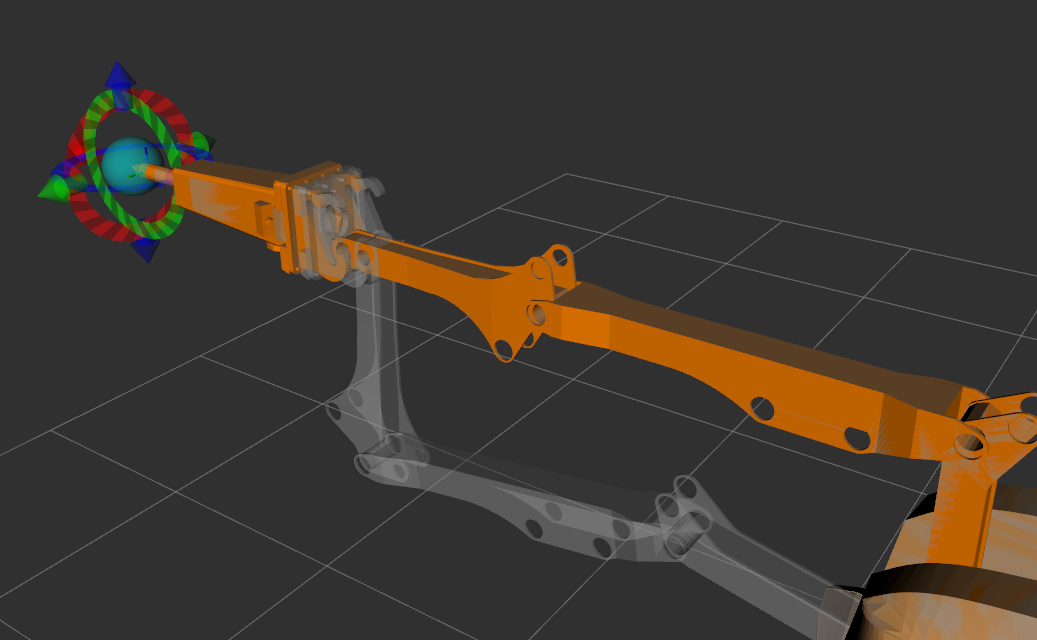
Result from TracIK: 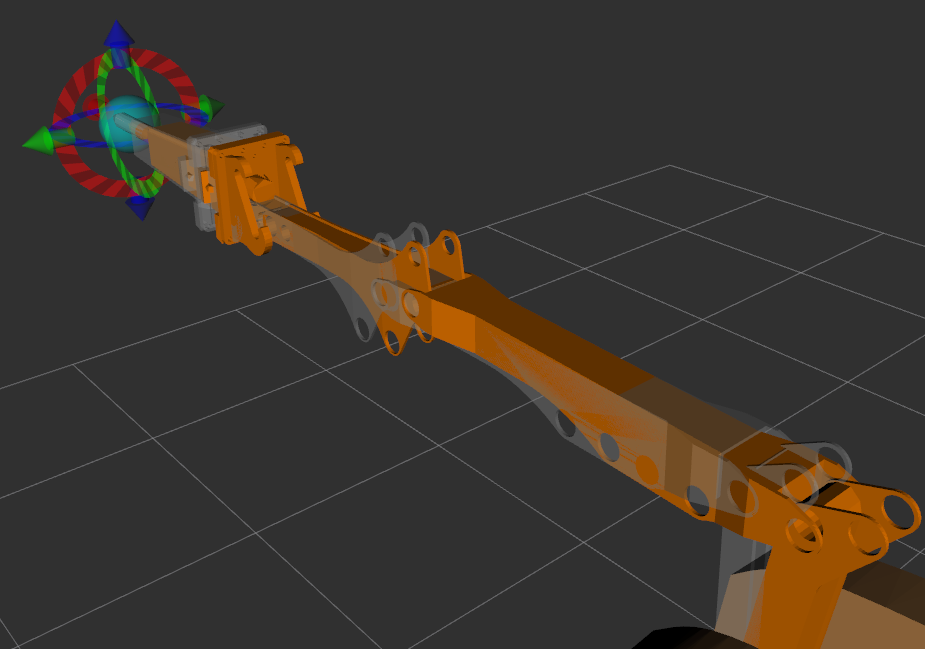
add a comment
