
Need help using matplotlib inside callback function
Hi,
at first I tried this code without ROS and the Raspberry Pi sense hat emulator and it works as expected:
#!/usr/bin/env python
import os
import sys
import matplotlib.pyplot as plt
import matplotlib.animation as animation
from matplotlib import style
import numpy as np
from sense_emu import SenseHat # start with sense_emu_gui
# from sense_hat import SenseHat
sense = SenseHat()
fig = plt.figure(num='Compass', figsize=[5, 3])
ax = plt.subplot(projection='polar')
def animate(i):
north = sense.get_compass()
ax.clear()
ax.set_theta_zero_location("N")
ax.set_theta_direction(-1)
ax.set_ylim(top=1)
# arrow at 45 degree
plt.arrow(north/180.*np.pi, 0.0, 0, 1, alpha = 0.5, width = 0.015,
edgecolor = 'black', facecolor = 'green', lw = 2, zorder = 5)
ani = animation.FuncAnimation(fig, animate, interval=1000)
plt.show()
The final result looks like:
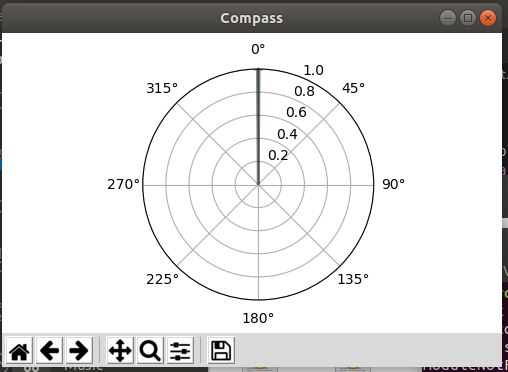
So instead of using the animate function I want to use a callback function from my subscriber. Of course I have a working publisher and the Sense HAT is working on my robot which is controlled via an Raspberry Pi. In other program I also use an subscriber to get data from my publisher. And in other programs I use also matplotlib and I can see different diagrams or plots or whatever it is called.
But in this example the figure is black.
#!/usr/bin/env python
import os
import sys
import re
import socket
import rospy
from robotcar_msgs.msg import Magnetometer
import numpy as np
import matplotlib.pyplot as plt
import matplotlib.animation as animation
from matplotlib import style
plt.style.use('seaborn')
plt.ion()
class CompassPlotter(object):
def __init__(self, robot_host):
"""Configure subscriber."""
# Create a subscriber with appropriate topic, custom message and name of
# callback function.
self.robot_host = robot_host
self.sub = rospy.Subscriber(self.robot_host + '/imu/magnetometer', Magnetometer, self.callback)
# Initialize message variables.
self.enable = False
self.data = ""
self.fig = plt.figure(num='Compass', figsize=[5, 3])
self.ax = plt.subplot(projection='polar')
if self.enable:
self.start()
else:
self.stop()
def start(self):
self.enable = True
self.sub = rospy.Subscriber(self.robot_host + '/imu/magnetometer', Magnetometer, self.callback)
def stop(self):
"""Turn off subscriber."""
self.enable = False
self.sub.unregister()
def callback(self, data):
"""Handle subscriber data."""
# Simply print out values in our custom message.
self.data = data
msg = "Got imu/magnetometer: North: %s" % self.data.north
rospy.loginfo(rospy.get_caller_id() + msg)
self.ax.clear()
self.ax.set_theta_zero_location("N")
self.ax.set_theta_direction(-1)
self.ax.set_ylim(top=1)
# arrow at 45 degree
plt.arrow(self.data.north/180.*np.pi, 0.0, 0, 1, alpha = 0.5, width = 0.015,
edgecolor = 'black', facecolor = 'green', lw = 2, zorder = 5)
plt.show()
plt.pause(.000001)
if __name__ == '__main__':
# Initialize the node and name it.
node_name = re.sub("-", "_", socket.gethostname()) + "_CompassPlotter"
rospy.init_node(node_name, anonymous=False)
compass = CompassPlotter("robotcar")
# Go to the main loop
try:
compass.start()
# Wait for messages on topic, go to callback function when new messages arrive.
# spin() simply keeps python from exiting until this node is stopped
rospy.spin()
# Stop with Ctrl + C ...add a comment
