
Moveit Benchmarking
Hello there,
I am following the moveit benchmarking tutorial.
https://ros-planning.github.io/moveit...
I am not able to understand what to do in steps 9,10, and In Step 8, Do I have to terminate roslaunch panda_moveit_config demo.launch db:=true this launch in the terminal by pressing ctrl + c?
Thanks in advance for the help!
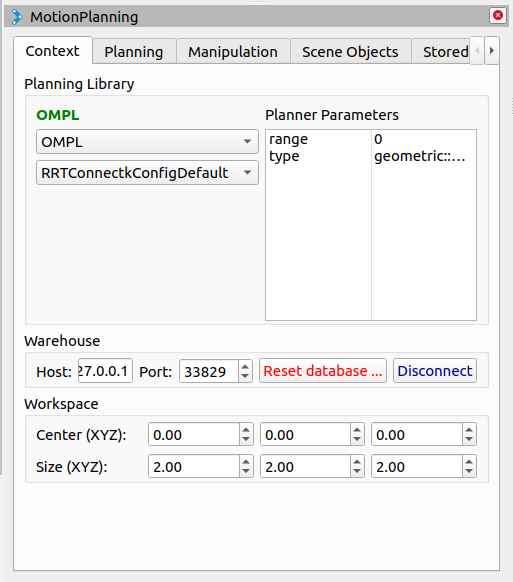
Change the location output_directory to export the benchmarked files.
Over here I have changed the directory to moveit_ros/benchmarks/examples location.
when I am running with this command then I am getting this errors: roslaunch moveit_ros_benchmarks demo_panda.launch
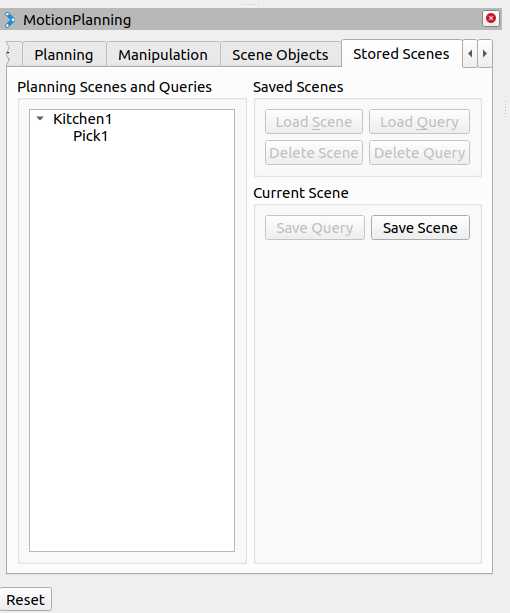
[ERROR] [1627455614.528753536]: Failed to find planning scene 'Kitchen1'
[ INFO] [1627455614.528812837]: Loaded planning scene successfully
[ERROR] [1627455614.528835750]: Failed to load benchmark query data
[ERROR] [1627455614.528869663]: Failed to run all benchmarks
[ WARN] [1627455614.554018335]: SEVERE WARNING!!!
Attempting to unload /home/kuka-ai/ai_catkin/devel/lib//libmoveit_kdl_kinematics_plugin.so
while objects created by this library still exist in the heap!
You should delete your objects before destroying the ClassLoader. The library will NOT be unloaded.
================================================================================REQUIRED process [moveit_run_benchmark-3] has died!
process has finished cleanly
log file: /home/kuka-ai/.ros/log/73e053dc-ef71-11eb-bc5e-5999434b0c67/moveit_run_benchmark-3*.log
Initiating shutdown!
================================================================================
[moveit_run_benchmark-3] killing on exit
[mongo_wrapper_ros_kukaai_ROG_Zephyrus_G15_GA502IU_GA502IU_8813_4306608128609173900-2] killing on exit
[rosout-1] killing on exit
[master] killing on exit
shutting down processing monitor...
... shutting down processing monitor complete

Very much looks like it, yes. Have you tried it?
Sounds like you didn't save your database/scene correctly, judging by
Failed to find planning scene 'Kitchen1'Are these correct steps that I have followed? Can it be a Database installation problem?
There might be an issue with how you specified the location. I haven't used the benchmarking code in a while. You can try to dig through the code, find where it loads the database, and print out the location it is checking. And then add that to the logging output for good measure.
Thanks for your suggestion. Will look into it.
After following MoveIt benchmarking tutorial, I still can't understand how it can be applied to my robot, because its tutorial is based on the panda arm.