
Octree is empty

I'm trying to make octomap simulation using Kinect plugin in Noetic. I made a dummy link and joint to transform the axis so that the Z axis faces forward for the Kinect sensor using this code segment:
<joint name="camera_rgb_joint" type="fixed">
<origin xyz="0 0 0" rpy="1.57079 3.14159 1.57079"/>
<parent link="kinect_link_1"/>
<child link="camera_rgbd_frame" />
</joint>
<link name="camera_rgbd_frame"/>
which gives the following results
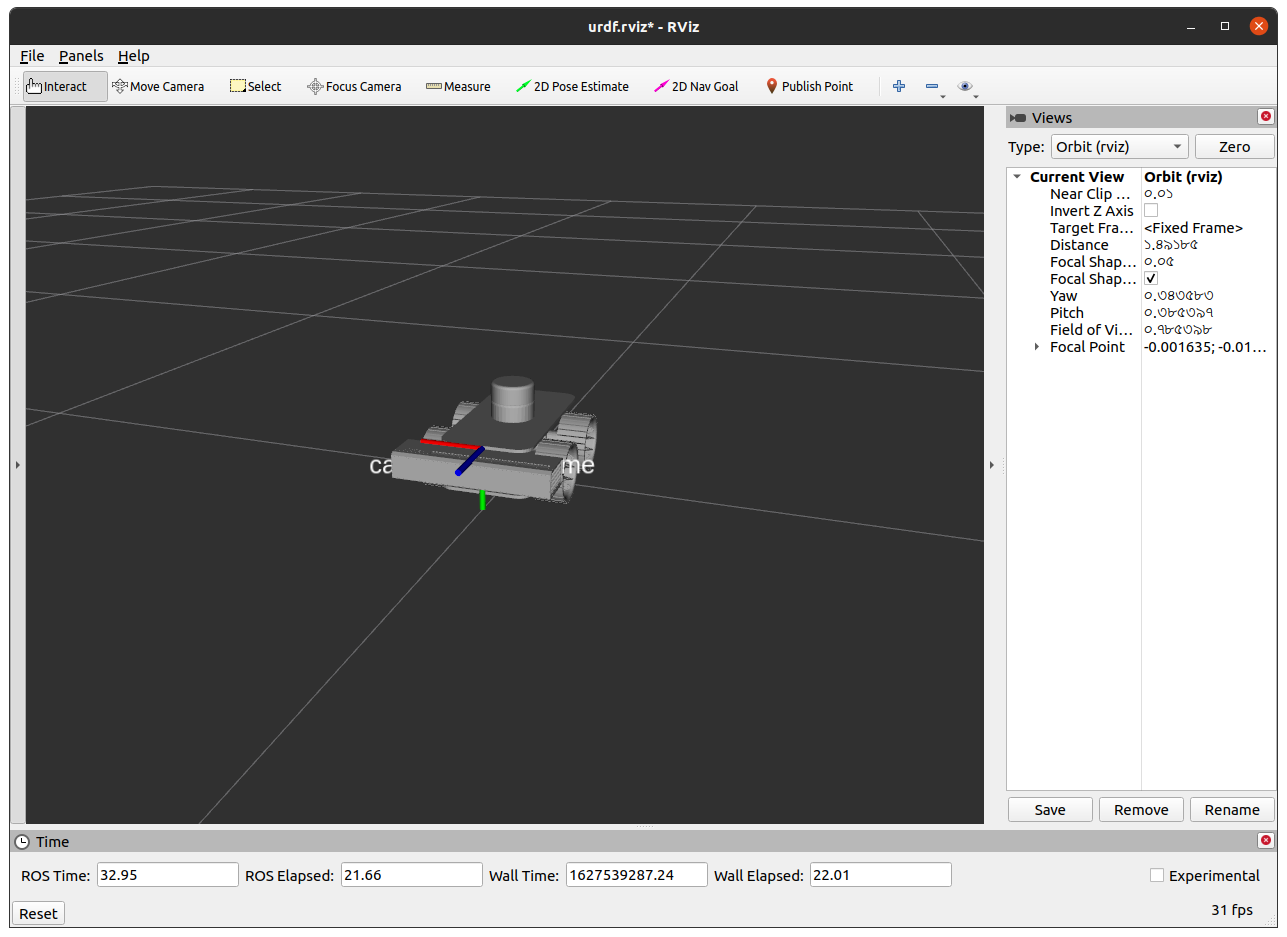
According to this, I just need to rotate it 90 degrees about the now Z axis, which I did using the following code segment:
<joint name="camera_rgb_joint" type="fixed">
<origin xyz="0 0 0" rpy="1.57079 4.7123 1.57079"/>
<parent link="kinect_link_1"/>
<child link="camera_rgbd_frame" />
</joint>
<link name="camera_rgbd_frame"/>
which gives the following orientation
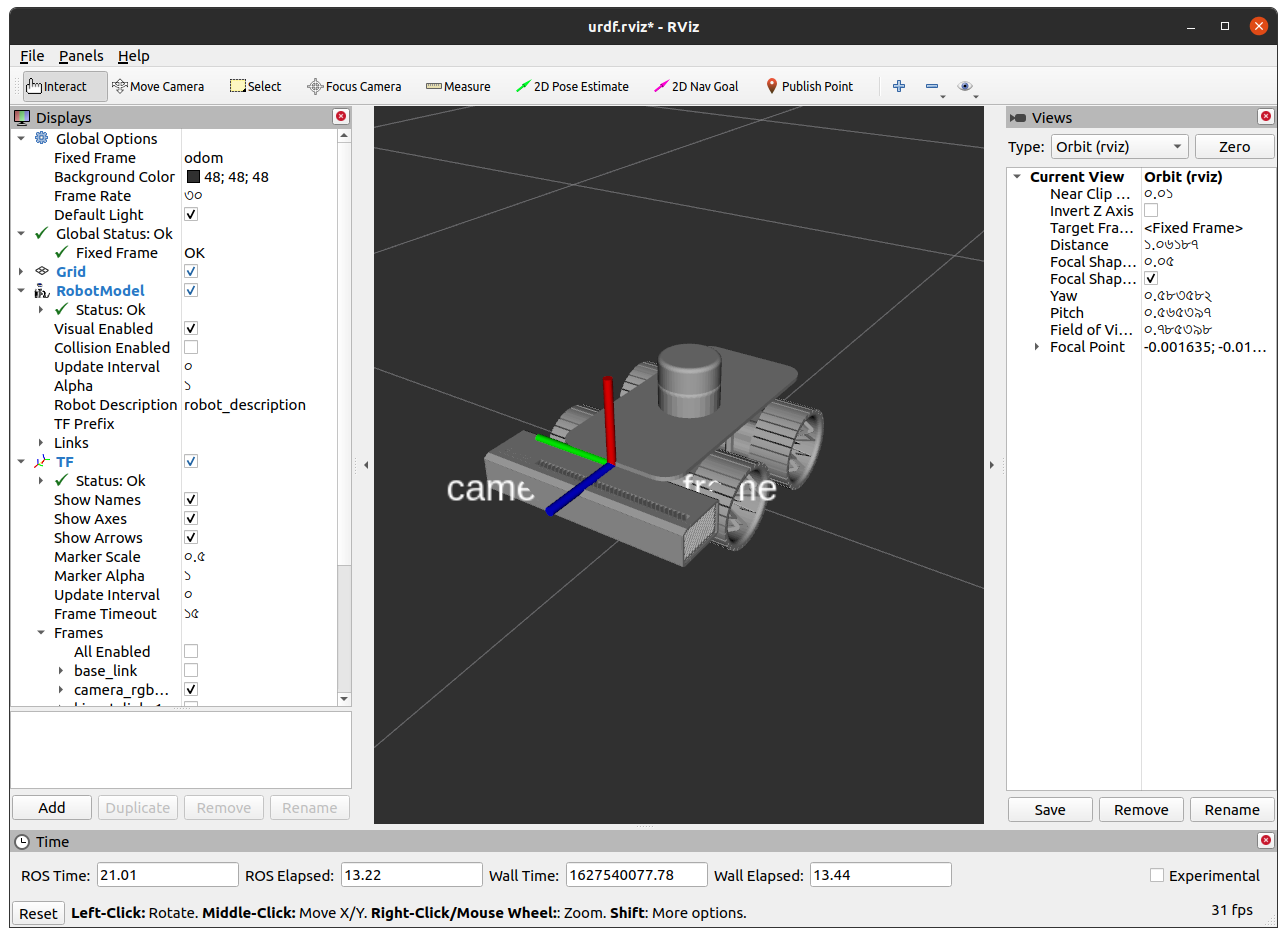
the octomap terminal gives an error saying
Nothing to publish! Octree is empty!
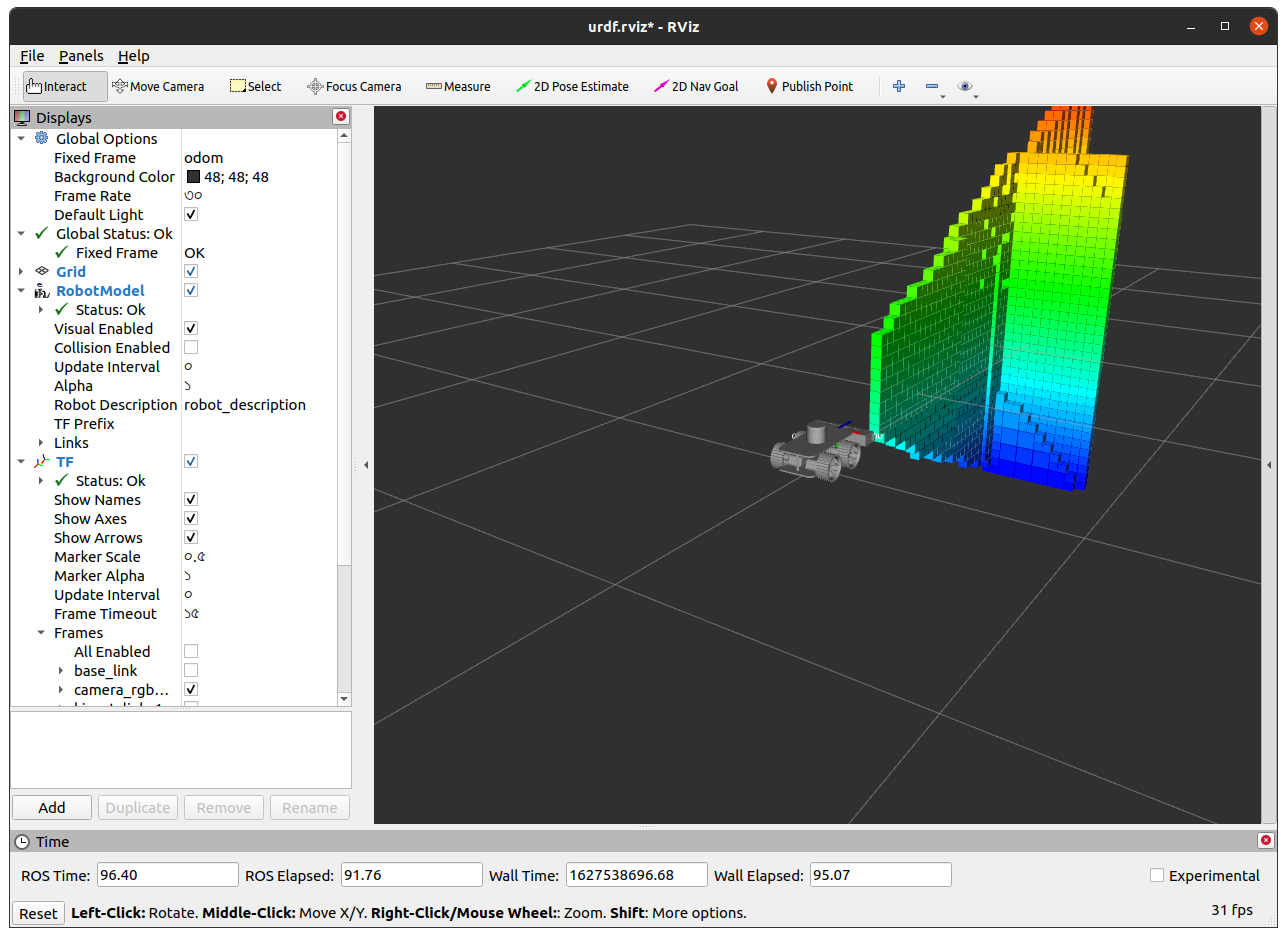
Each time I rotate 190 degrees about the now Z axis from the initial values, i.e y axis on left or right of robot, the map sets up like picture 1.
I'm so close to this, yet so far. Please help!
add a comment
