
Nav2 tutorial not working on foxy

I have ubuntu 20.04, ROS Foxy, and I have tried installing Nav2 using sudo apt-get and from source but neither worked for me. The issue exactly: following the "running the example" section, the robot opens in Gazebo after a very long time, also RViz opens but the robot doesn't appear. When I try to change the fixed frame in RViz the whole thing crashes.
This is the final message before it dies:
`[map_server-5] Magick: abort due to signal 11 (SIGSEGV) "Segmentation Fault"...
[ERROR] [map_server-5]: process has died [pid 16670, exit code -6, cmd '/opt/ros/foxy/lib/nav2_map_server/map_server --ros-args -r __node:=map_server --params-file /tmp/tmpvfuy6r6q -r /tf:=tf -r /tf_static:=tf_static']. 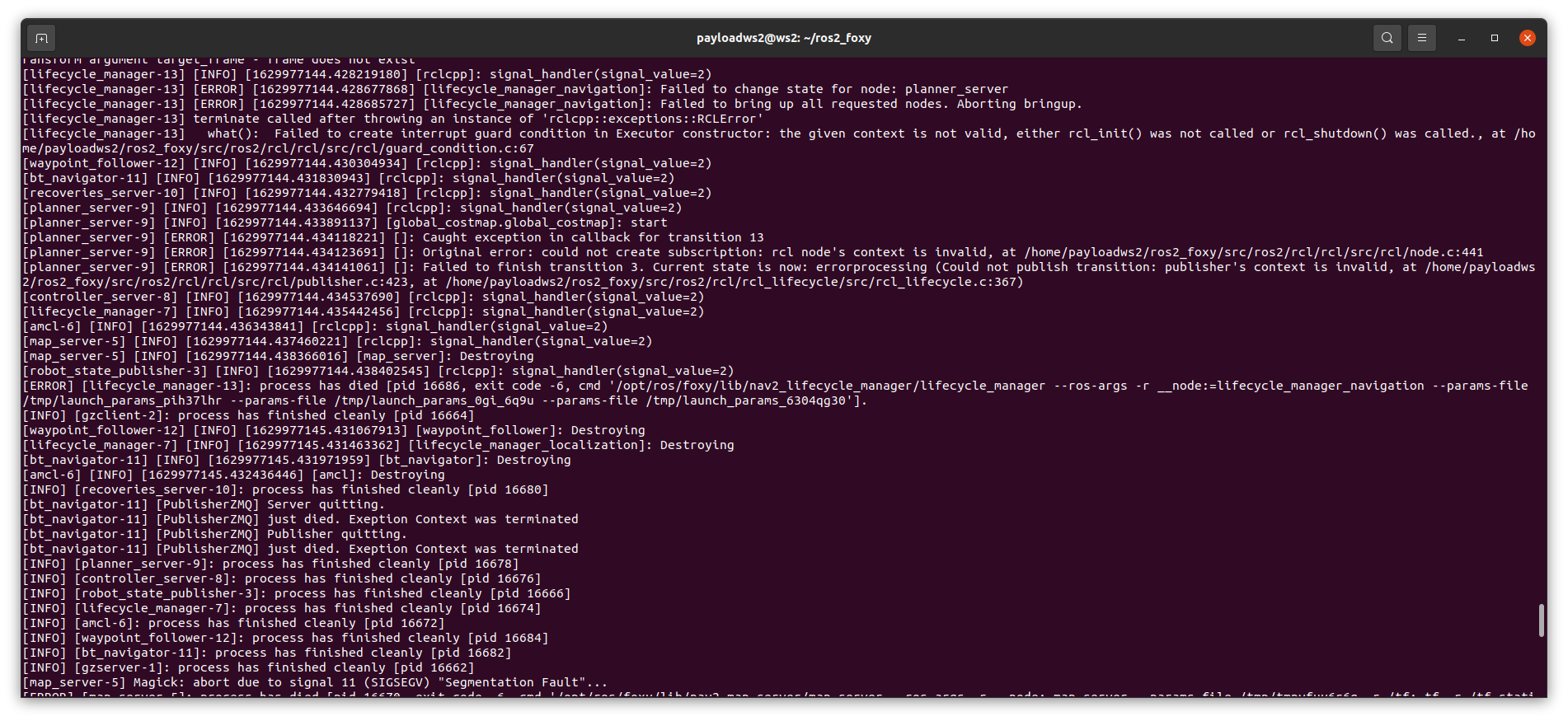
Link to the tutorial I was following
I've tried it on three different computers, same exact error (all three computers have the same ubuntu, ros, and gazebo versions)
Should I go to a previous commit or something for Nav2?

