
TF broken and not correct in Hector Pose Estimation when fusing IMU and Pressure Sensor
Im doing some underwater UUV Gazebo simulation and would like to use the
hector_pose_estimation
package to fuse IMU and Fluid pressure sensors input for pose estimation. In the gazebo launch file I add this tf transformation <node pkg="tf" type="static_transform_publisher" name="world_to_nav" args="0 0 0 0 0 0 /world /nav 100" /> . Im not sure is need it and is the correct one, so the tf looks like this 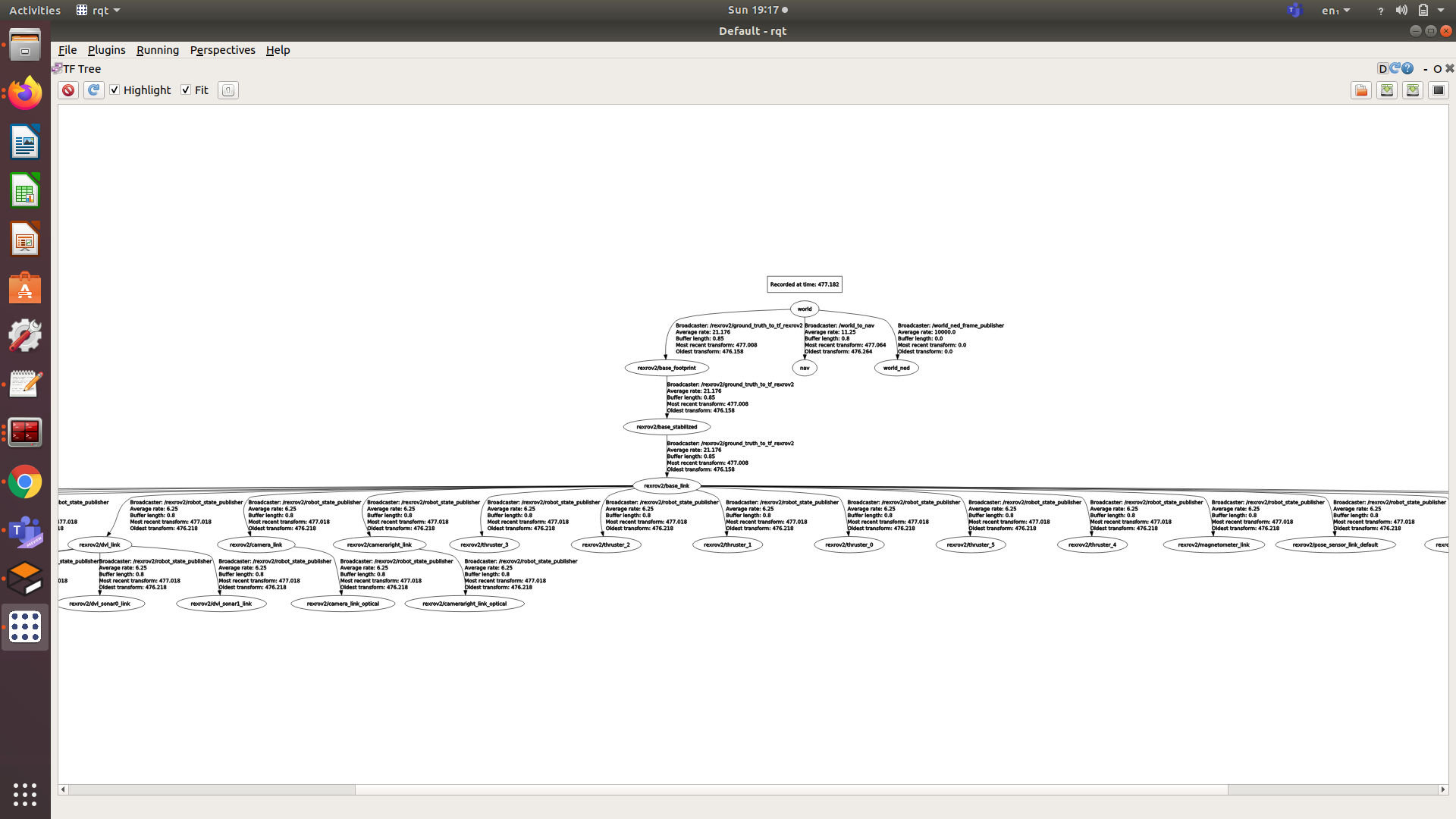
when using the following hector_pose_estimation launch file
<?xml version="1.0"?>
<launch>
<node pkg="hector_pose_estimation" type="pose_estimation" name="hector_pose_estimation">
<remap from="raw_imu" to="/rexrov2/imu" />
<remap from="pressure_height" to="/pressure_height" />
</node>
<node pkg="tf" type="static_transform_publisher" name="nav_to_base_footprint" args="0 0 0 0 0 0 /nav /rexrov2/base_footprint 100" />
</launch>
The TF is following 
The both TF from gazebo and hector_pose_estimation are not correct. Any help how to get the correct frames to make it work? And when using the above launch the hector_pose_estimation /pose is like these
header:
seq: 329
stamp:
secs: 781
nsecs: 118000000
frame_id: "nav"
pose:
position:
x: 0.0
y: 0.0
z: -1.64102132948e-09
orientation:
x: -8.80621330591e-06
y: 0.000294167493465
z: 3.71623915803e-14
w: 0.999999956694
Which is not correct as I have the true pose which if following
header:
seq: 15460
stamp:
secs: 781
nsecs: 608000000
frame_id: "world"
child_frame_id: "rexrov2/base_link"
pose:
pose:
position:
x: 0.083413690347
y: 0.133535986662
z: -0.77756440376
orientation:
x: -9.34768900238e-06
y: 0.000294151069482
z: 0.00184072884918
w: 0.999998262551
In the hector /pose the frame_id: "nav" and no child_frame. In the real pose is frame_id: "world" and child_frame_id: "rexrov2/base_link" (rexrov2 is the name of the robot) . So any help how to fix it?
Thanks
