
Cannot send goal point beyond a certain point in map for move_base
Hello, i wrote a Global planner plugin for the move_base node for my quadcopter and currently I am using the default DWA local planner. In Rviz, I cannot send the goal beyond a current boundary, check video for more clarity on what I am saying..
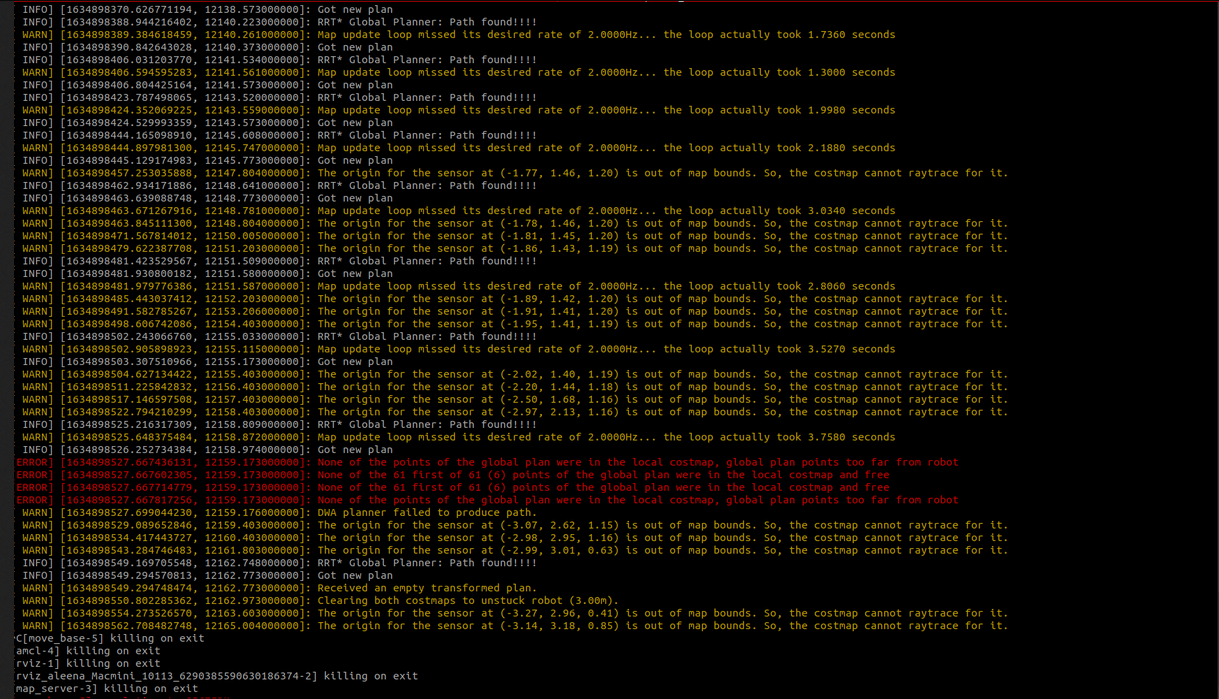
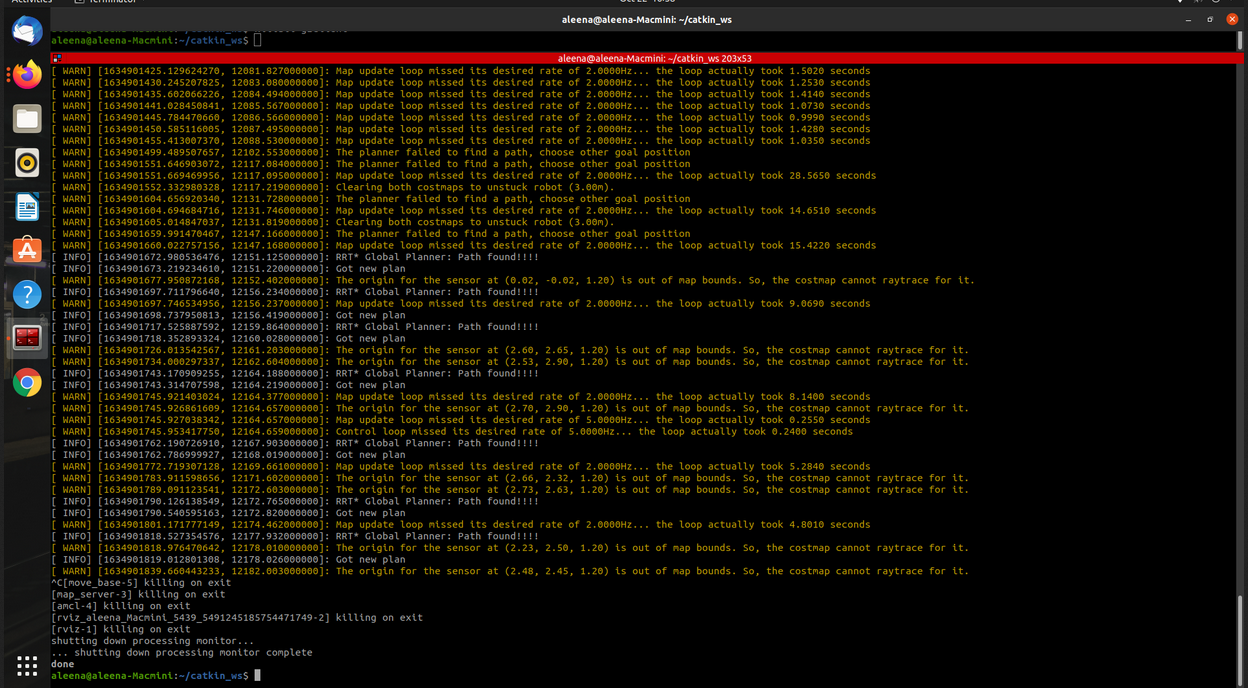
Added to that I get 2 errors and some warnings too which I have failed to rectify even after reading many answers in answers.ros.org.
Attaching the errors and warnings that I am getting.
Any help or discussion would be really encouraged!
Thanks Aleena

"check video", I cant see a video or link. Please update. What kind of sensor is used here? What is fed to the costmap_2d. "quadcopter" might be a z issue?