
turtlebot3 sticks to walls on setting dijkstara=false and use_grid_path=true
I am testing various mapping algorithms on turtlebot3 using the turtlebot3_navigation package. I set base_global_planner as global_planner/GlobalPlanner. to use the a star algorithm is set use_dijkstra to false and use_grid_path to true.
GlobalPlanner:
old_navfn_behavior: false
use_quadratic: true
use_dijkstra: false
use_grid_path: true
allow_unknown: true
planner_window_x: 0.0
planner_window_y: 0.0
default_tolerance: 0.0
publish_scale: 100
planner_costmap_publish_frequency: 0.0
lethal_cost: 253
neutral_cost: 50
cost_factor: 3.0
publish_potential: true
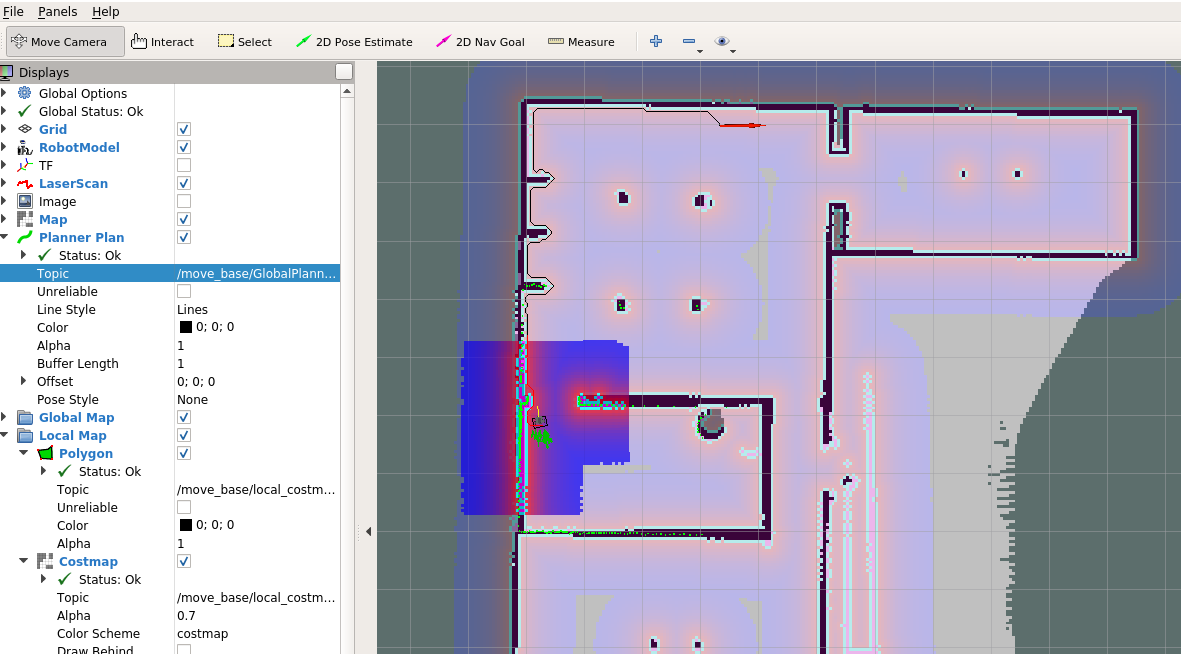
this gives this strange behavior where the robot sticks to the walls as seen in this picture here:
Upon reverting to navFn for global planning or setting the use_dijkstra to true:
old_navfn_behavior: false
use_quadratic: true
use_dijkstra: true
use_grid_path: false
this wall sticking behviour is no more and everything goes back to normal.

{kind=link}
Please take a look at this prior answer: https://answers.ros.org/question/2763...
I'd start with playing with inflation radius as suggested in this answer.