
Sending my own path to ROS Navigation stack, Where can I locate the 'internal' nav_msgs/Path in the code?

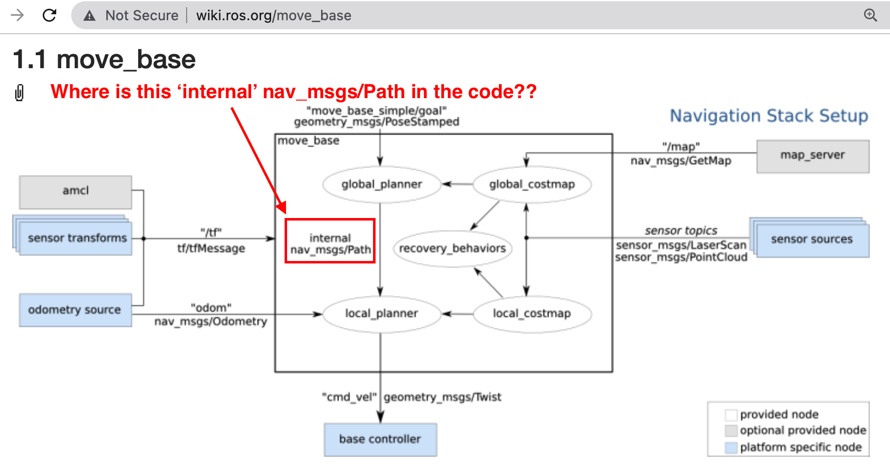
Does anyone know where I can find this 'internal' nav_msgs/Path in the code of the ROS Navigation stack? Is it move_base.cpp? navfn_node.cpp? trajectory_planner_ros.cpp?
add a comment


