
Regarding the dwa local planning algorithm, there is a large angular deviation or left-to-right deflection after reaching the target point?
Regarding the dwa local planning algorithm, there is a large angular deviation or left-to-right deflection after reaching the target point:
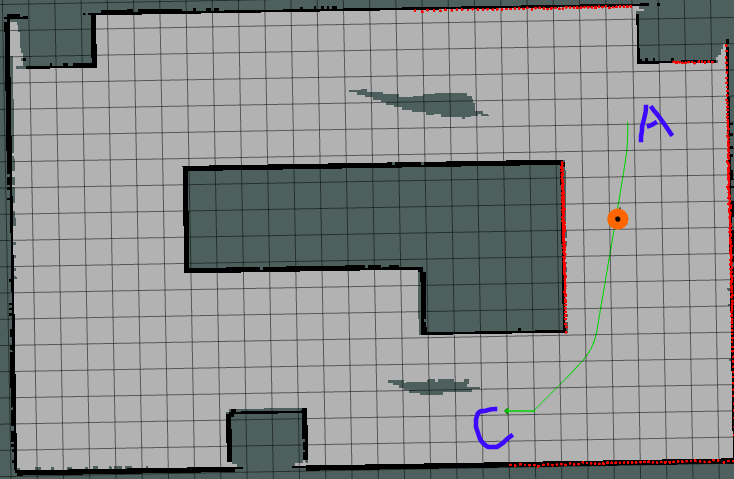
According to the figure above, the robot is from A to C, but in the simulation, the robot can stop accurately, but in reality, the robot will have a large directional deviation angle when it reaches point C, or it will move along at point C swing left and right.
Below are my DWA parameters:
dwa:
max_vel_x: 0.8
min_vel_x: 0.0
max_vel_y: 0.0
min_vel_y: 0.0
max_vel_trans: 1.0
min_vel_trans: 0.01
trans_stopped_vel: 0.02
max_vel_theta: 0.8
min_vel_theta: 0.1
theta_stopped_vel : 0.05
acc_lim_x: 1.0
acc_lim_theta: 1.0
acc_lim_y: 0.0
acc_lim_trans: 0.2
meter_scoring: true
yaw_goal_tolerance: 0.1
xy_goal_tolerance: 0.15
latch_xy_goal_tolerance: false
sim_time: 1.2
sim_granularity: 0.025
vx_samples: 10
vy_samples: 0.0
vth_samples: 20
path_distance_bias: 32
goal_distance_bias: 20
occdist_scale: 0.01
forward_point_distance: 0.325
stop_time_buffer: 0.2
scaling_speed: 0.25
max_scaling_factor: 0.2
oscillation_reset_dist: 0.05 # 0.05
publish_traj_pc : true
publish_cost_grid_pc: true
holonomic_robot: false
global_frame_id: odom
map_frame: map
controller_frequency: 5
controller_max_retries: 0

yaw_goal_toleranceset to?I am using the melodic version of ros1. The value of my yaw_goal_tolerance is 0.15, and I increased it to 2, but occasionally the above problems may occur.
The dwa config file would be interessting. What mechanics does your base have, diff drive? Also, is only the real robot off or does rviz also show the deviation? There is a "latch_xy_goal_tolereance" paramter. Its defined as "If goal tolerance is latched, if the robot ever reaches the goal xy location it will simply rotate in place, even if it ends up outside the goal tolerance while it is doing so. " link Sounds close to what you seem to be describing.
Yes, mine is in differential drive mode, but when I adjust to 0.2, the problem still exists. Observing in rviz and actual conditions will find that the position of the robot is offset, or the robot cannot stop immediately at the target point.
"the robot cannot stop immediately at the target point" Are you just overshooting? Could it be that inertia is moving the robot off target then? I would suggest trying low max_vel_x (0.1 or so).