
move base node only publishing 0's linear and angular values on /cmd _vel topic
I am using the navigation stack and when running the code my robot does not move (but sometimes it does start publishing on the cmd_vel topic) and then I did a rostopic echo on the cmd_vel topic and noticed it was only publishing 0's I have told it to move sending a command via the 2D nav goal in Rviz, and I have a node subscribing to the /initialpose and /move_base_simple/goal topics and publishing /initial_2d and /goal_2d which I have confirmed work , for odometry i do not use an imu only motor encodors which are running on my Arduino in that publishes encoder ticks (I have checked and this works to) also on the Arduino it subscribes to /cmd_vel (works) the encoder ticks are published to a node that calculates the encodor ticks to odometry (works) and then published to the robot_pose_ekf package to get a pose estimate (works)I also tried running the rqt_graph and everything seemed normal also I am using a RPlidar A1 (Works) I was wondering If I should add an IMU because I tried a test for my odometry, recommended on the navagation troubleshooting guide and when trying the tests it recommended my odometry was poor and I was wondering if the bad odometry was the cause. also I have not configured the robot footprint and just used some values that were not configured for my robot and just went along with this because I don't khow how to measure these or what to meausure btw: I am not using a simulation, thank you for your help
Getting this warning:
[ WARN] [1644177008.699891513]: Map update loop missed its desired rate of 30.0000Hz... the loop actually took 0.0341 seconds
results from rostopic echo /cmd_vel
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
---
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
---
results from rostopic echo /move_base/feedback/goal
WARNING: topic [/move_base/feedback/goal] does not appear to be published yet
results from rostopic echo /move_base/feedback/status
goal_id:
stamp:
secs: 1644178269
nsecs: 471130979
id: "/move_base-7-1644178269.471130979"
status: 1
text:
"This goal has been accepted by the simple action server"
---
result from rostopic echo /move_base/feedback/result
WARNING: topic [/move_base/feedback/result] does not appear to be published yet
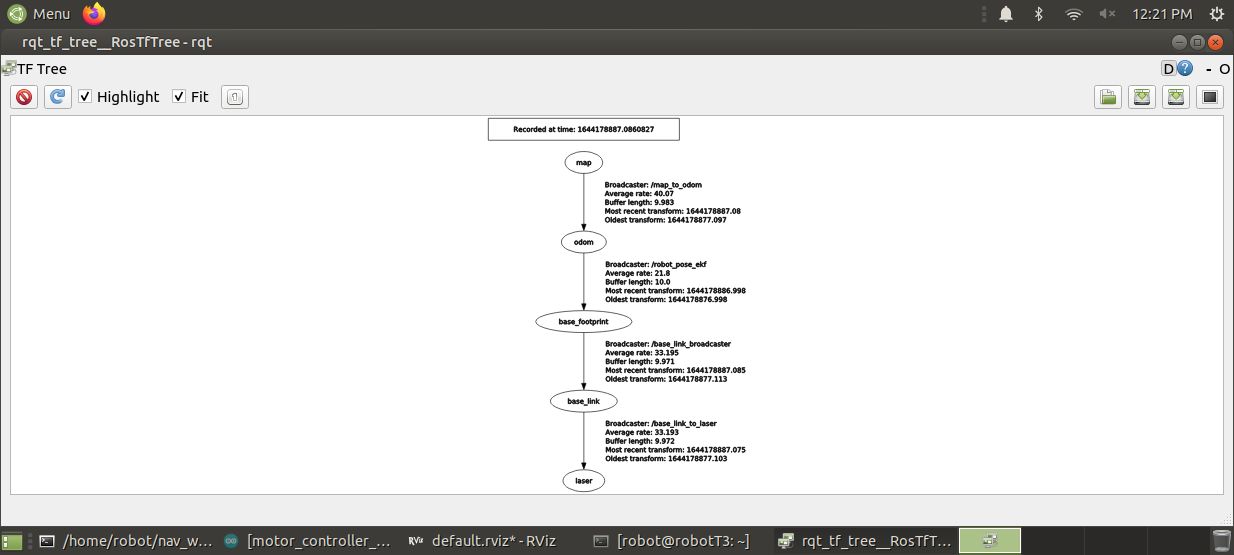
screenshot of the tf tree
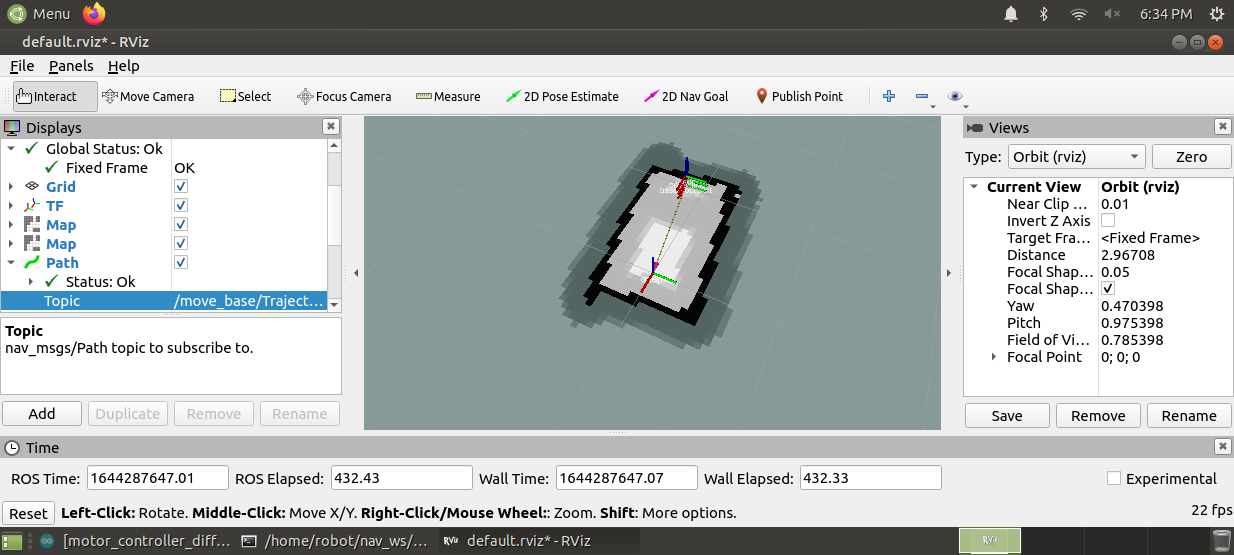
screenshot of local costmap in rviz
base_local_planner_params.yaml
TrajectoryPlannerROS:
max_vel_x: 0.60
min_vel_x: 0.30
#max_vel_theta: 0.05
#min_vel_theta: -0.05
#min_in_place_vel_theta: 0.05
#acc_lim_theta: 0.07
#acc_lim_x: 0.40
#acc_lim_Y: 0.40
holonomic_robot: false
costmap_common_params.yaml
obstacle_range: 0.5
raytrace_range: 0.5
footprint: [[-0.14, -0.14], [-0.14, 0.14], [0.14, 0.14], [0.14, -0.14]]
map_topic: /map
subscribe_to_updates: true
global_frame: odom
robot_base_frame: base_link
update_frequency: 30.0
publish_frequency: 30.0
rolling_window: false
plugins:
- {name: static_layer, type: "costmap_2d::StaticLayer"}
- {name: obstacle_layer, type: "costmap_2d::ObstacleLayer"}
- {name: inflation_layer, type: "costmap_2d::InflationLayer"}
static_layer:
map_topic: /map ...
The robot shouldn't move until you've told it to move, and you haven't mentioned what your interaction with the robot looks like here. As far as I can tell this is the robot behaving as expected. You'll have to provide more detail if you'd like a more detailed answer.
I added so more detail if you need more detail just ask
Can you please post your code to see if something is missing
(the code I used is not mine so the credits go to https://automaticaddison.com)
https://automaticaddison.com/how-to-p... (encoder ticks to odometry) https://automaticaddison.com/how-to-c... (subscribes to initial pose and 2d nav goal) https://automaticaddison.com/how-to-c... (arduino code for publishing encoder ticks and listening to /cmd_vel)
Could you please your format your code snippets properly? You can do that by selecting the code snippets and pressing
Ctrl + K.Could you also add a
Rvizscreenshot of thelocal costmap?Could you also add the terminal outputs for the following commands after sending a
2DNavGoal—rostopic echo /cmd_velrostopic echo /move_base/feedback/goalrostopic echo /move_base/feedback/statusrostopic echo /move_base/feedback/resultCould you also put a screenshot of your
tftree? You can do that by runningrosrun tf view_framesfollowed byevince frames.pdf.