
Can't i use pepperl fuchs r2000 sensor in ROS 20.04 noetic?

Hi, i'm a begginer of learners of ROS(20.04 noetic). I have the laser scanner(pepperl fuchsr r2000) and i try to test my sensor in rviz. I followed the link http://wiki.ros.org/pepperl_fuchs_r2000 so i could check data through topic named '/r2000_driver_node/scan' but i couldn't see 3D data by Rviz(there are no any datas) Should i take any actions excluding the above link's course? or can't i use the sensor data because there are no option about noetic in the sensor's information in the above link?C:\fakepath\Screenshot from 2022-02-08 10-09-56.png

{kind=link}
Have you installed the package for
pepperl_fuchs_r2000?You can find the repo: https://github.com/dillenberger/peppe...
Need to build it from source as it was last distributed for ROS melodic.
Yes, i installed that..can't i use the package and sensor in noetic? should i install the melodic instead of noetic?
I need to clarify what do you mean by installing are you able to see the package when running
rospack listIf yes on the installation what error do you get when launching:
roslaunch pepperl_fuchs_r2000 gui_example.launchi installed the pepperl_fuchs_r2000 package and i can check the package was installed well by running 'rospack list' too! and i could receive the laser scan data(numbers) by topic but i couldn't see any datas in rviz..
and there are no error when i launch roslaunch pepperl_fuchs_r2000 gui_example.launch
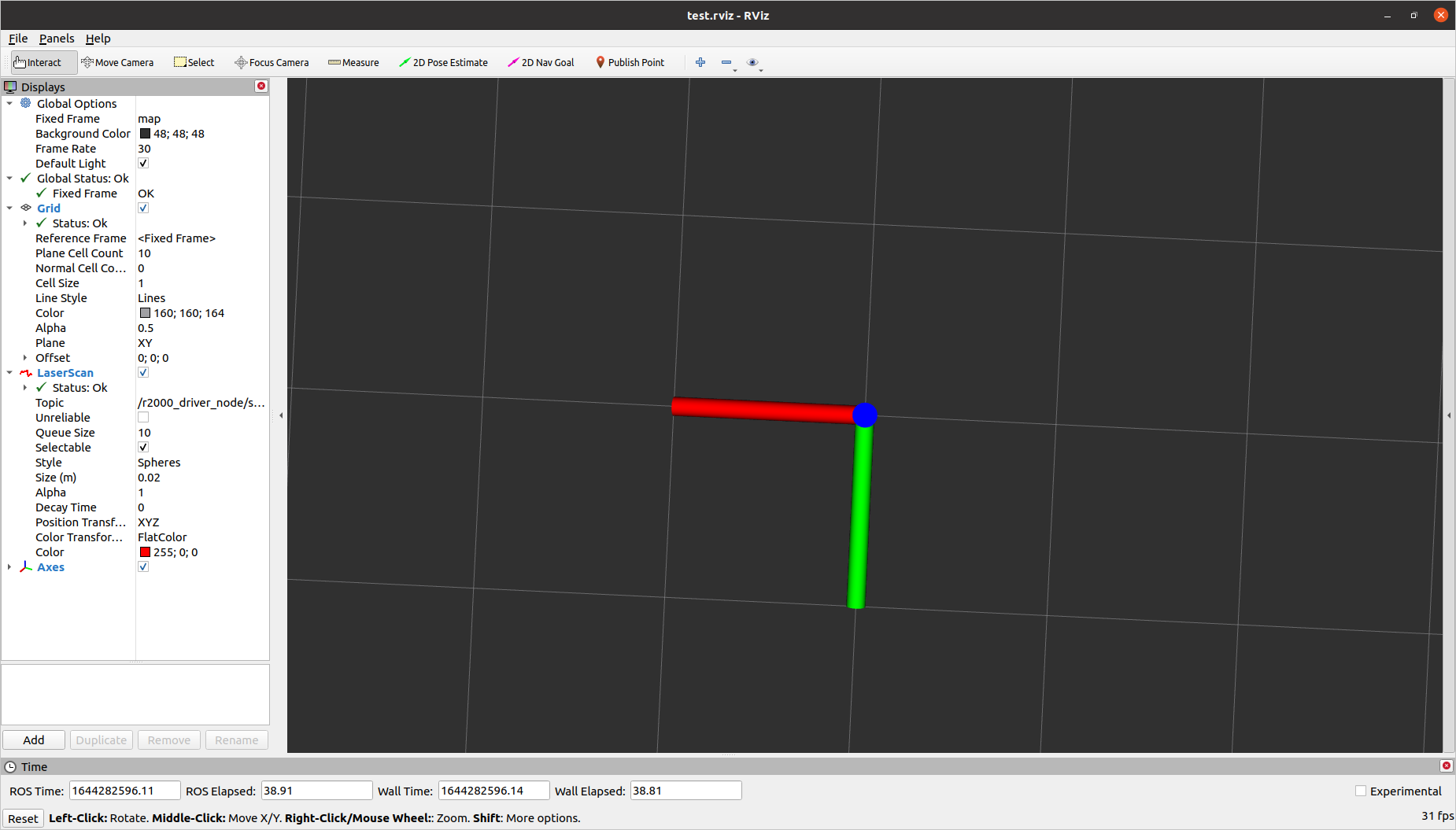
So then IP is setup correctly. Could you take a snapshot of your RVIz and add to your question
Added points so you can add images