
No local costmap when launching nav2 multiple turtlebot3
Running Ubuntu 20.04 with ROS2 Galactic
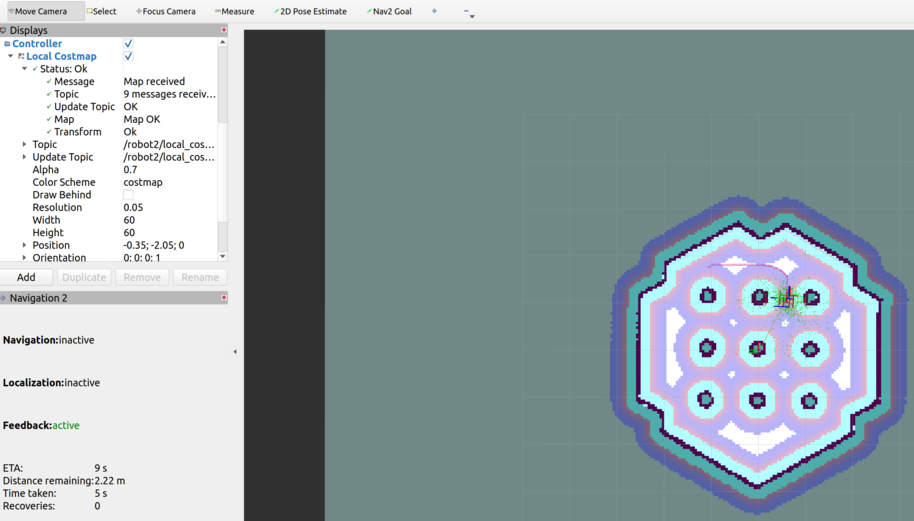
I have problems when launching the multi_tb3_simulation_launch.py file from Nav2. After pose estimation, I get a global costmap and the robot can move using the Nav2 Goal. The laser scan is working as it can see the other robot, but the local costmap is not working, so it will just drive right into it.
On the left side of Rviz, the Navigation and Localization nodes are inactive while the Feedback node is active.
I also get the following info message for both robots:
[rviz2-4] [INFO] [1648559333.984046497] [robot1.rviz]: Message Filter dropping message: frame 'base_scan' at time 8.770 for reason 'discarding message because the queue is full'
Image of rviz from the multi_tb3_simulation_launch.py launch:
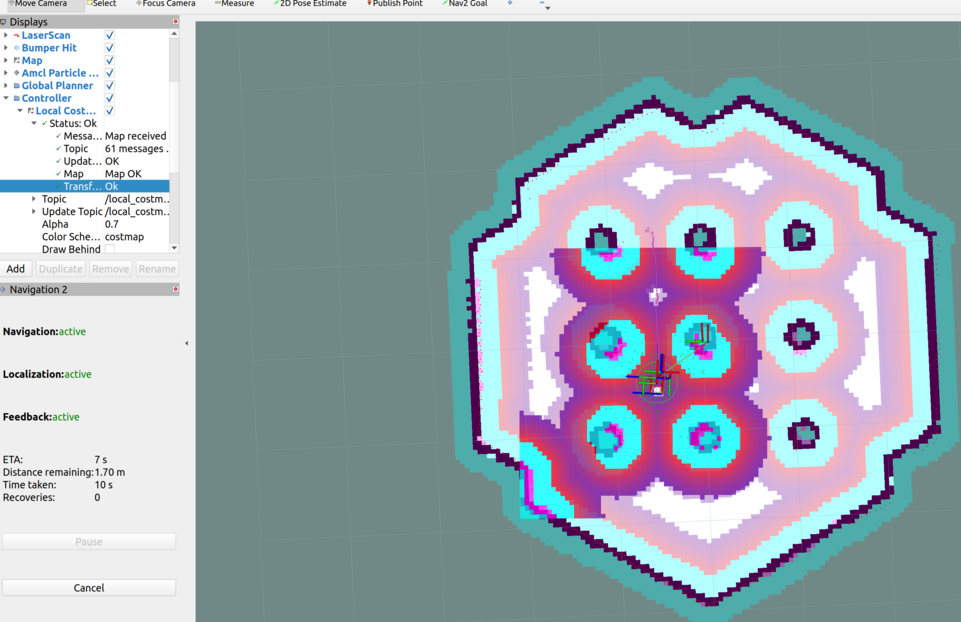
Everything works when I run the tb3_simulation_launch.py launch.
Installed a fresh ROS2 galactic and installed the following:
Navigation2 as source as well as sudo apt install ros-galactic-navigation2 and sudo apt install ros-galactic-nav2-bringup
Then I installed all things turtlebot and gazebo related: sudo apt install ros-galactic-turtlebot3* and sudo apt install ros-galactic-gazebo-*
Any ideas?
