
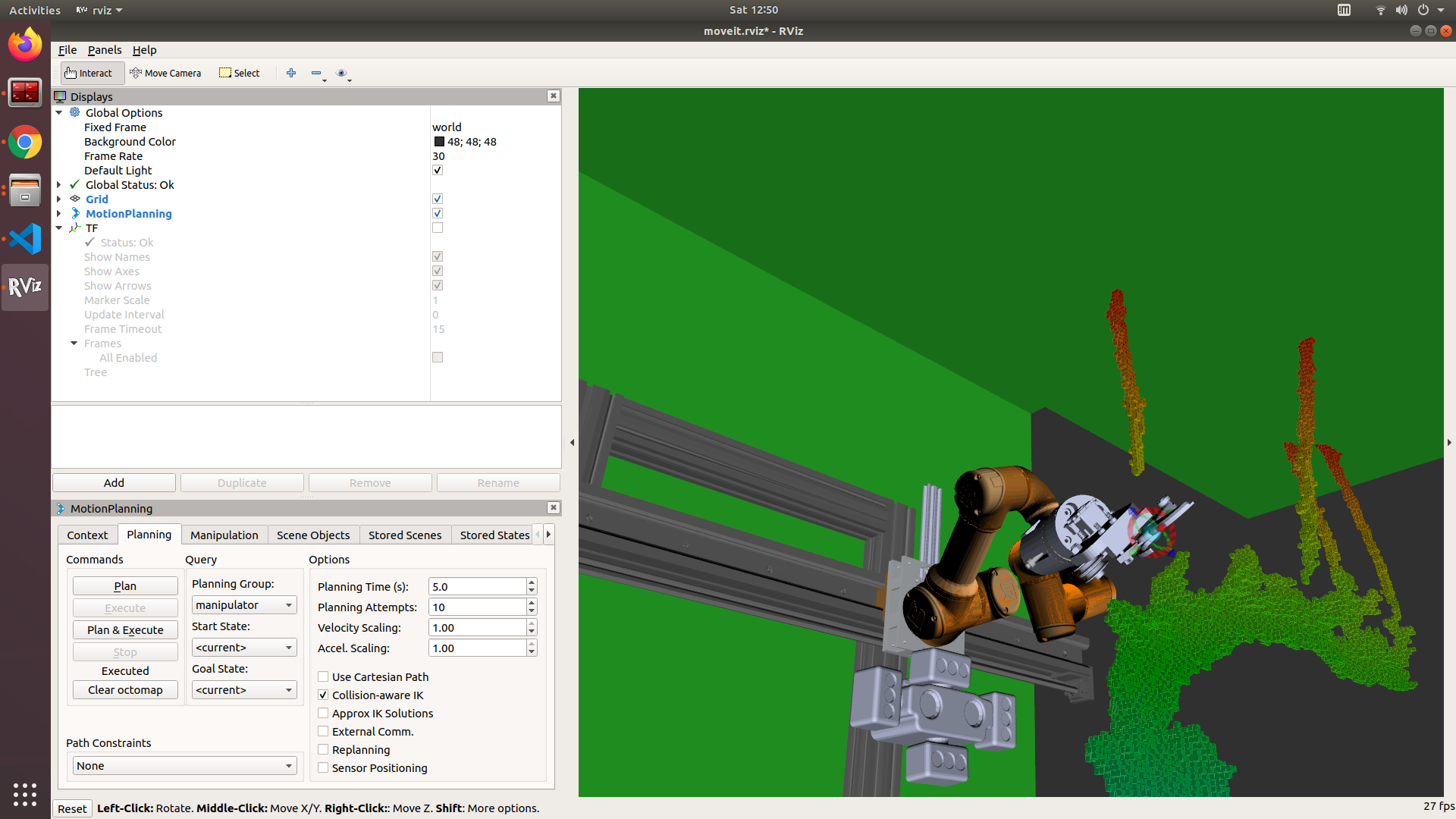
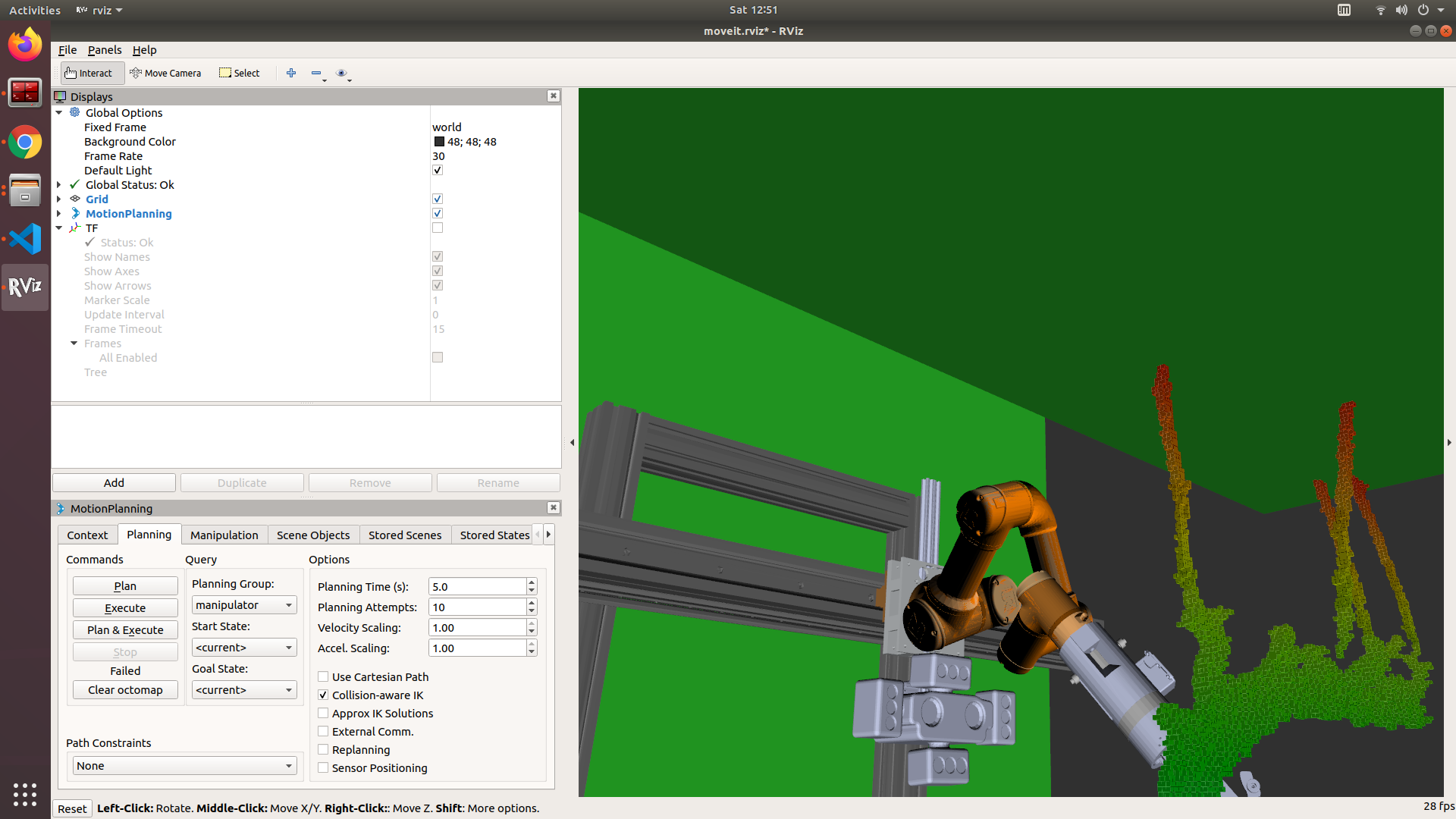
Arm's end effector clears octomap instead of going into collision
During planning the arm generates a plan which is not wrong but it ends up clearing the octomap where it should not. This results in a situation where when we try to plan to the next location it thinks it's in free space and hits the environment.
The moment I bring the arm away from the octomap manually the octomap fills up again.
The following images show what I mean.
Here is my sensors_3d.yaml:
sensors:
- filtered_cloud_topic: filtered_cloud
max_range: 5.0
max_update_rate: 0.1
padding_offset: 0.1
padding_scale: 1.0
point_cloud_topic: /narrow_stereo/points_filtered2
point_subsample: 1
sensor_plugin: occupancy_map_monitor/PointCloudOctomapUpdater
Any help is appreciated!

Are you using the
moveit PlanningScene? If so, how are you populating it with obstacle data?