
Problems using Find Object with a Kinect sensor
I am trying to connect my Kinect to the Find Object application, I have already managed to get kinect_bridge to publish the information of the different images captured by the sensor in ROS topics. The problem I have is that when I run the command:
roslaunch find_object_2d find_object_3d_kinect2.launch
The Find Object graphical interface opens and after a few seconds it closes automatically sending the error shown in the screenshot.
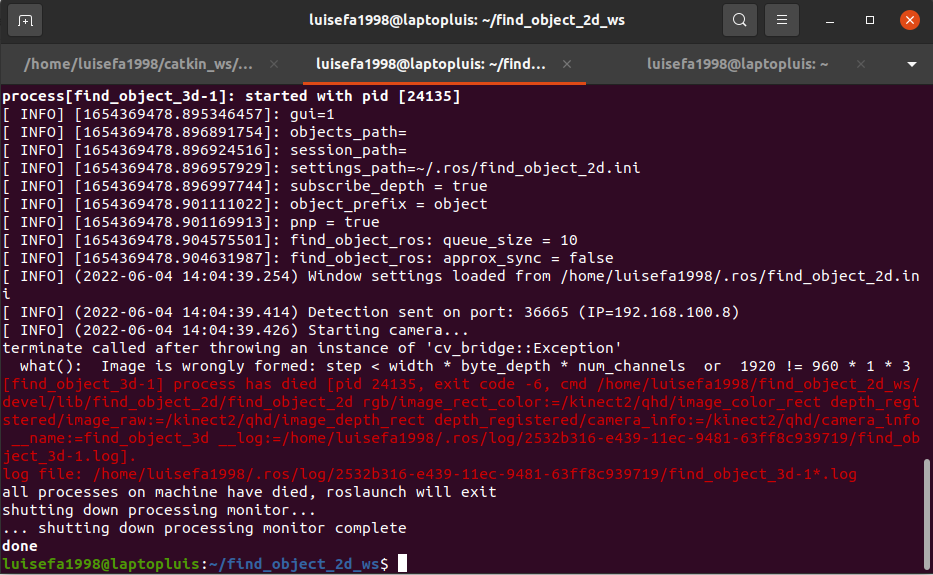
Does anyone know how to correct it? Apparently the dimensions of the image are not correct, but I don't know where and how to change that.
add a comment
