
/gazebo/model_states yields incorrect orientation for cube
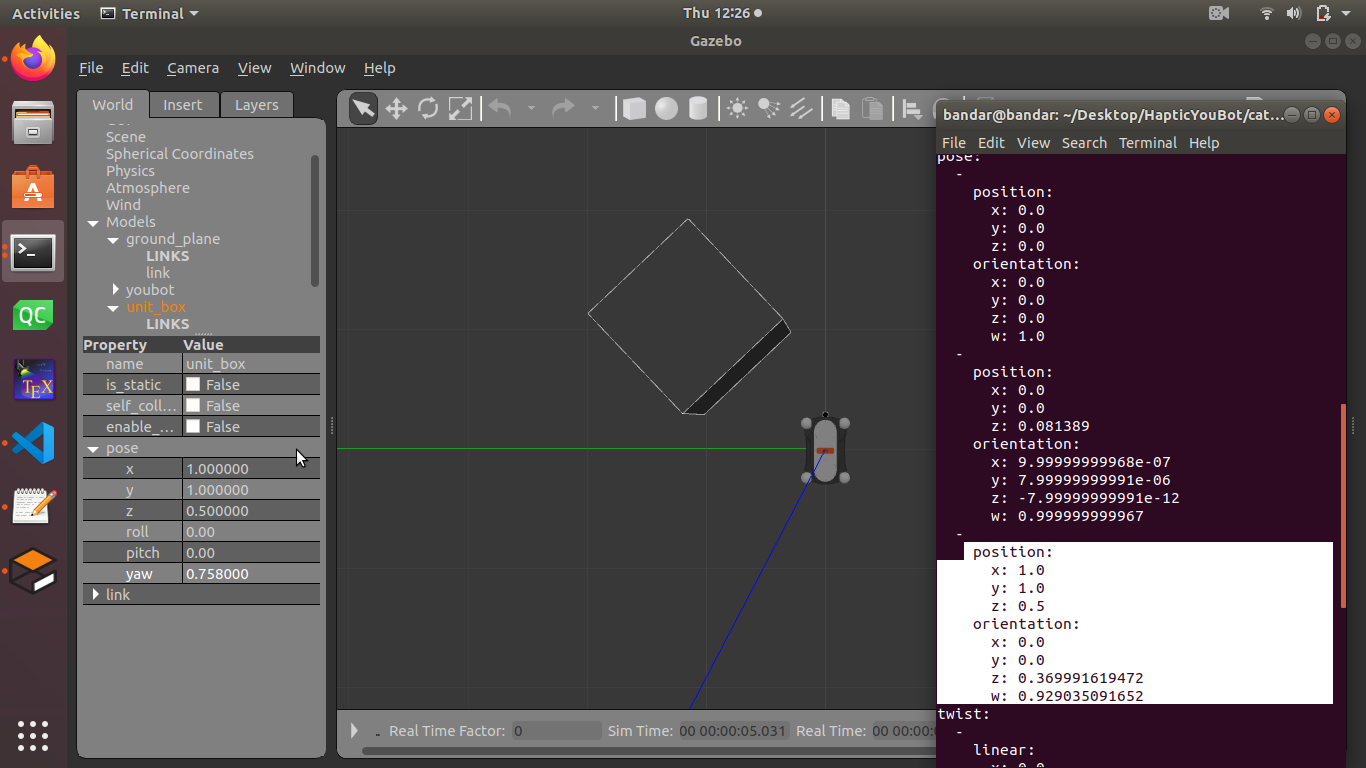
I'm trying to access the pose of cube in gazebo using /gazebo/model_states. There is a large error between the reported result by /gazebo/model_states and Gazebo GUI. Take a look at the following picture. The GUI shows 0.758 and /gazebo/model_states gives 0.369. I need to use this data as ground truth but from what I'm noticing, I need to make sure there is no discrepancy. Any suggestions?
Melodic, Gazebo 9, Ubuntu 18.04.
add a comment
