
Turtlebot Cameras(Kinect/d435) Cannot detect objects below a certain level from the ground.
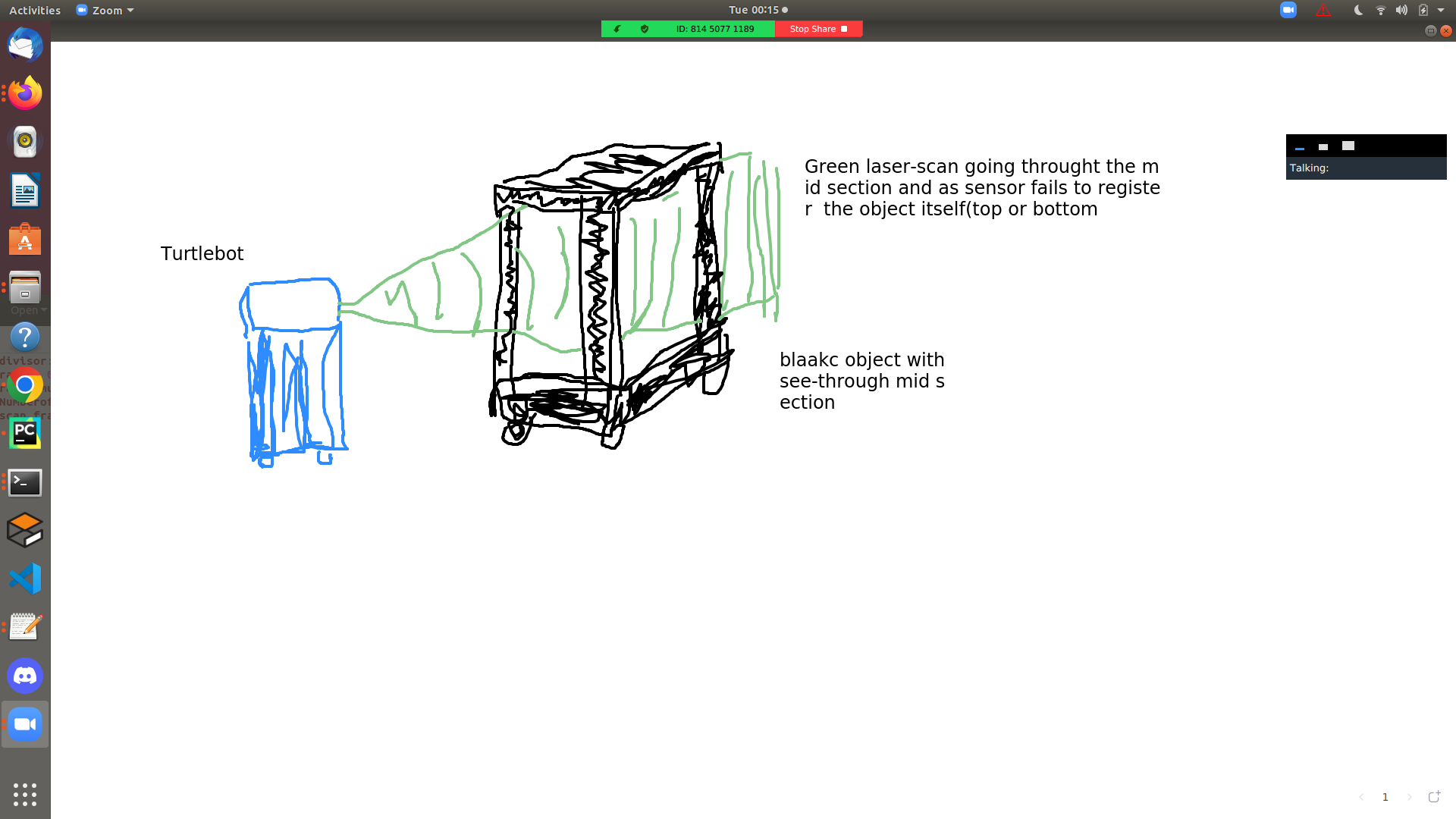
I am making use of the depthimage_to_laserscan package with my cameras and turtlebot2. When gmapping, neither my d435 camera nor backup camera(kinect) is able to register certain objects and parts of objects that are close to the floor, like certain table legs, the small wheels on a white board, objects that have a solid base but a mid section with large opening(please see illustration below) etc. what are the launch files I can mess around with?
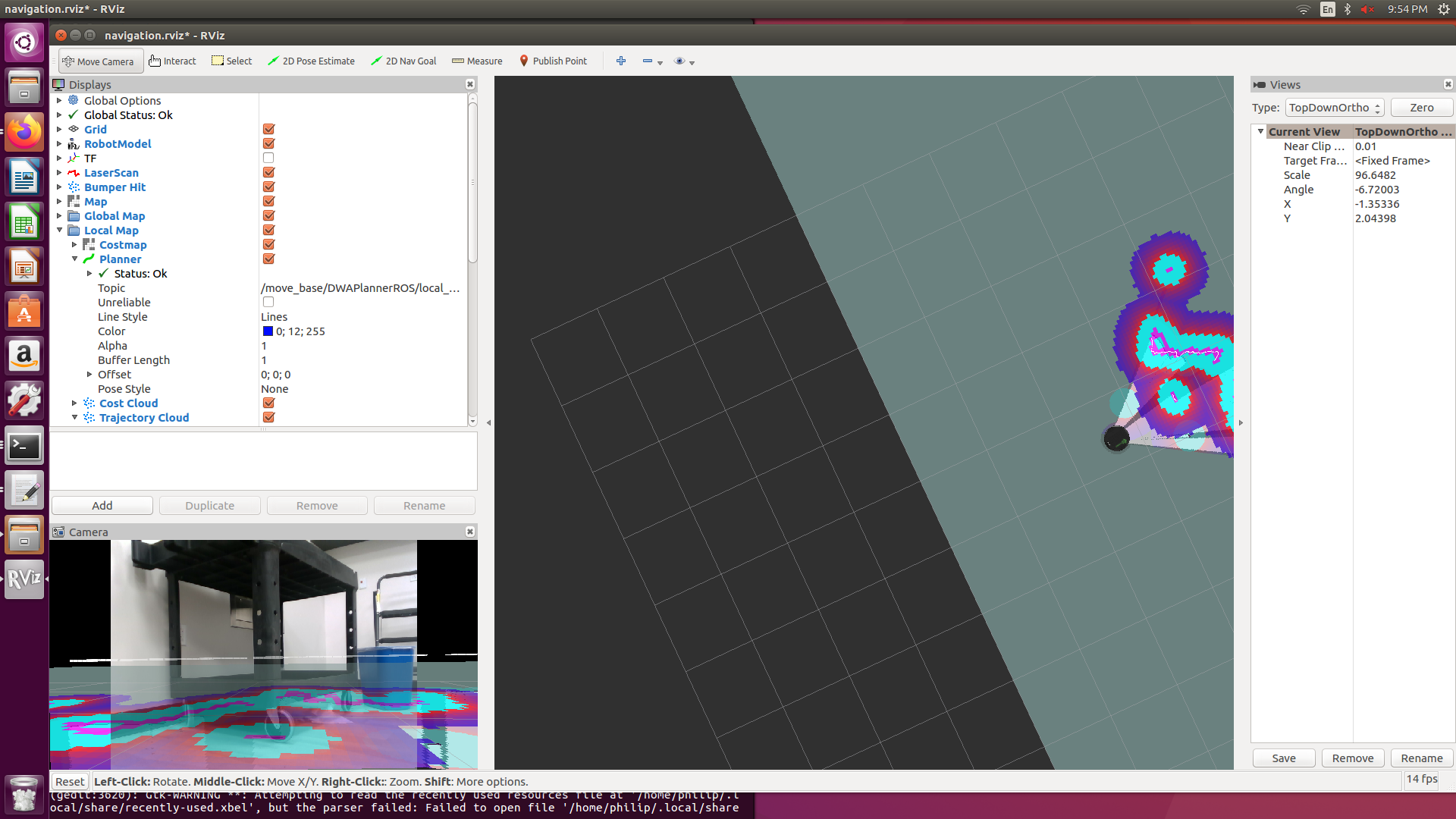
RE-EDIT: Re-examining my RVIZ, There is a horizontal line that divides the image as seen below. The depth cloud looks fine. The horizontal line represents the laserscan data. The laserscan is created from where the camera is positioned on the robot in real life. It seems that the part depth information from that line of sight(that is, the horizontal line) is used for creating the laserscan, the laser scan information is thereofre kind of useless as it does not effeceinetly describe the environment because there are obstacles or parts of obstacles below that line of sight.
Is there a way to resolve this? I want the the whole part of the image to be converted or if I have to chose, I wish for the lower half to be used instead.By the way, the object below is the same as the object "hand drawn" in the previous image.

Related question with a nice answer: https://answers.ros.org/question/3905...
@ljaniec I don't know exactly what file I can find the equivalent of
min height,max heightparameters because the solution from your link talks about thepointcloud_to_laserscanpackage. I'm dealing with thedepthimage_to_laserscanpackage.You can transform depth image to pointcloud e.g. with this package depth_image_proc
@ljaniec How would that help me solve my root issue of not being able to detect objects that are low to the ground? I have editted my Question by the way.
You could transform it to pointcloud, then use
pointcloud_to_laserscanwith itsmin_height/max_heightparameters or itstarget_frameparameter as in the answer linked above@ljaniec in anycase,
pointcloud_to_laserscanpackage apparently does not have a branch for kinetic. I have tried to build it in my workspace and it didn't build.Maybe these problems can be solved, what are they?
@ljaniec I'm not sure what you mean? I've already explained the problem I'm having, that's the point of the question haha. I probably don't get what you mean. I'm not sure if the ossue is with the
depthimage_to_laserscanpackage or if it has to do with the cameras sepcifically.