
Clarification about relative orientation of UR5
I'm trying to understand the relative position and orientation. Take a look at the below picture. The end-effector frame (i.e. the top right frame) for the UR5 is shown. Its relative orientation is shown in RViz as x=0,y=0,z=0.707,w=0.707. My understanding for relative orientation is with respect to the previous frame (i.e. the top left frame in the picture), but it seems to me the orientation is carried out by 90 deg around y-axis of that frame but the result shows the orientation about z-axis by 90 deg. What is exactly the relative and absolute position and orientation in ros?
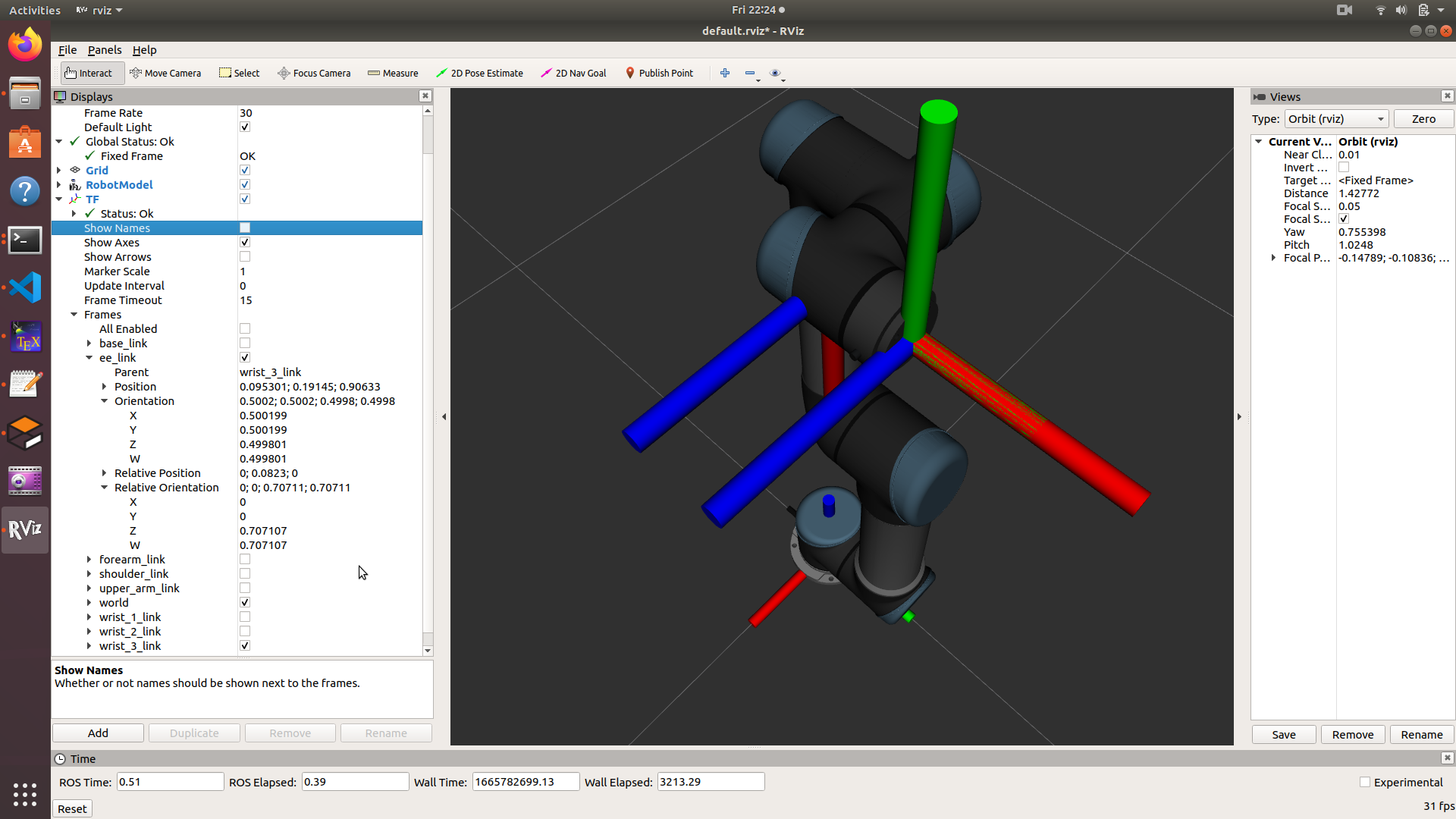

I would assume that the colours of the axes are: X-Axis = Red Y-Axis = Green Z-Axis = Blue Therefore the rotation between the left upper and the right upper frame is a rotation around the z-axis by +90° (right hand rule).