
dual_ekf_navsat+Turtlebot3 - problem with getting orientation

Nov 4th update:
https://youtu.be/0kUQZ5qLRQA 30seconds video
Oct 26th update:
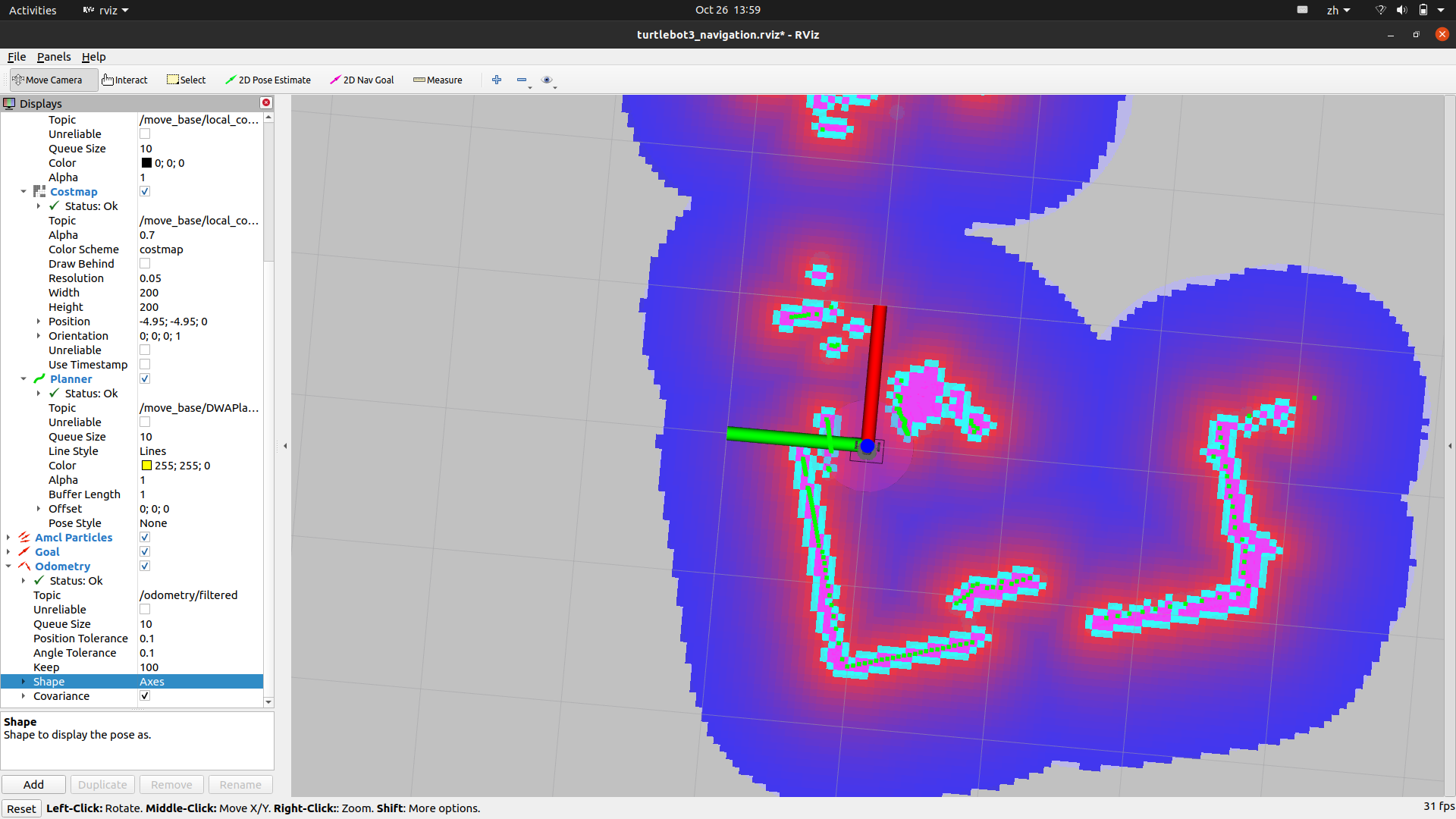
Problems: 1. odometry orientation does not changes. 2. warning messages when running dual_ekf_navsat_example.launch
commands that I run on the master (laptop):
roscore
roslaunch turtlebot3_navigation turtlebot3_navigation.launch map_file:=/home/yuxiang/Desktop/Robot/empty_map.yaml
roslaunch robot_localization dual_ekf_navsat_example.launch predict_to_current_time_:=true
commands that I run on the turtlebot3 (remote):
roslaunch turtlebot3_bringup turtlebot3_robot.launch
roslaunch ros_imu_bno055 imu.launch serial_port:=/dev/ttyUSB1 operation_mode:=NDOF_FMC_OFF use_magnetometer:=True
rosrun nmea_navsat_driver nmea_serial_driver _port:=/dev/ttyUSB2 _baud:=9600
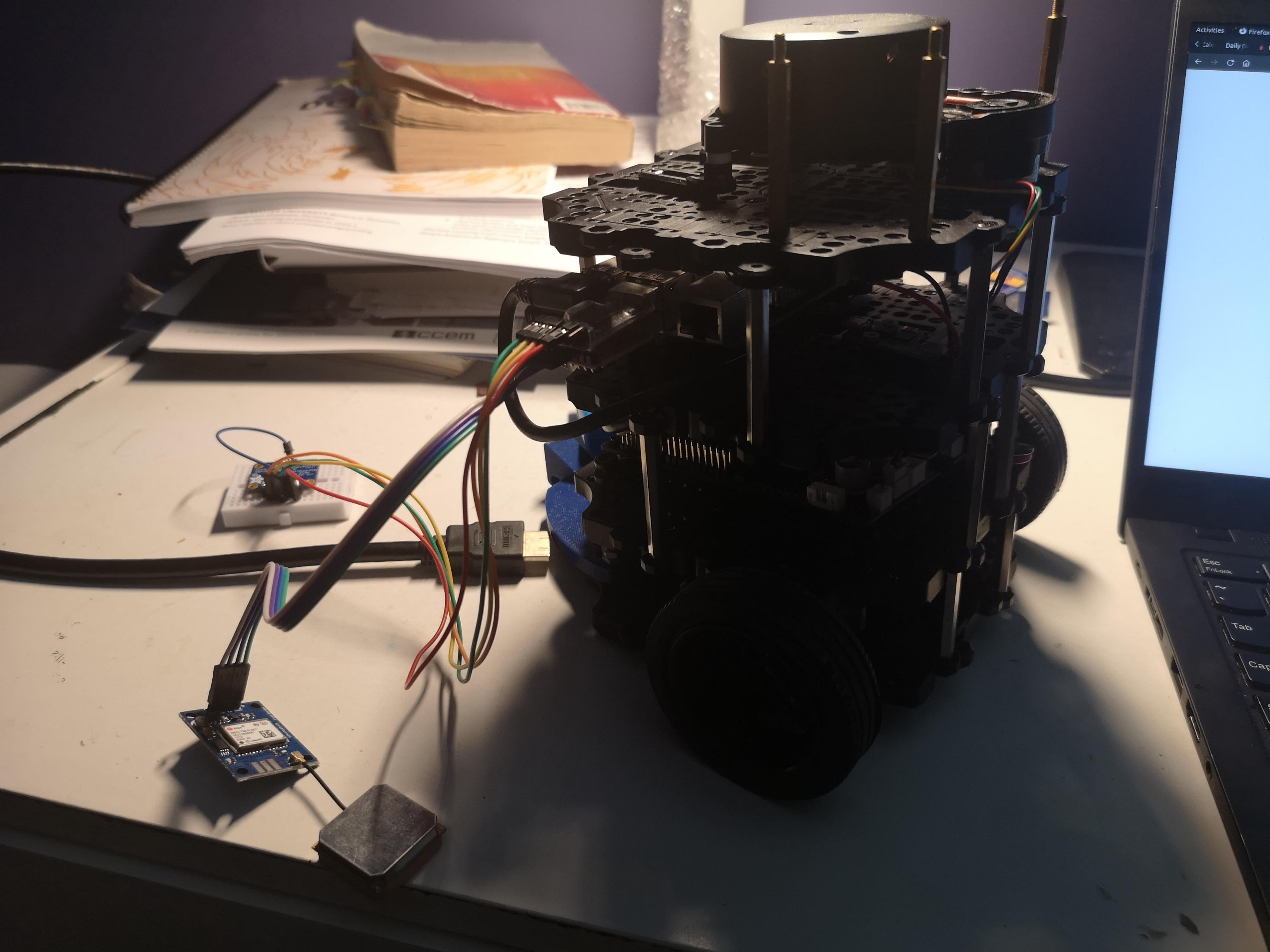
physical setup:
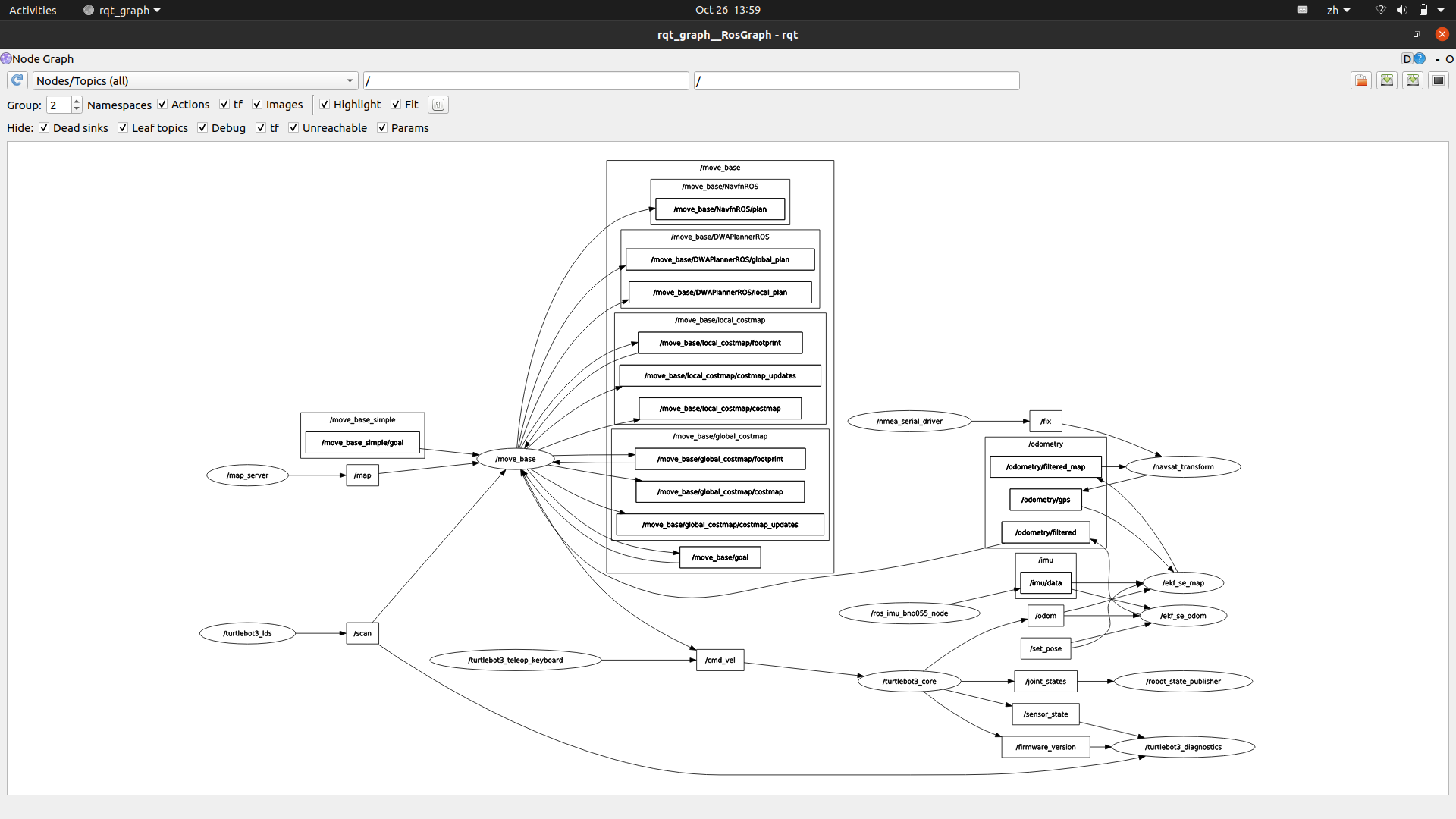
 rqt_graph
rqt_graph
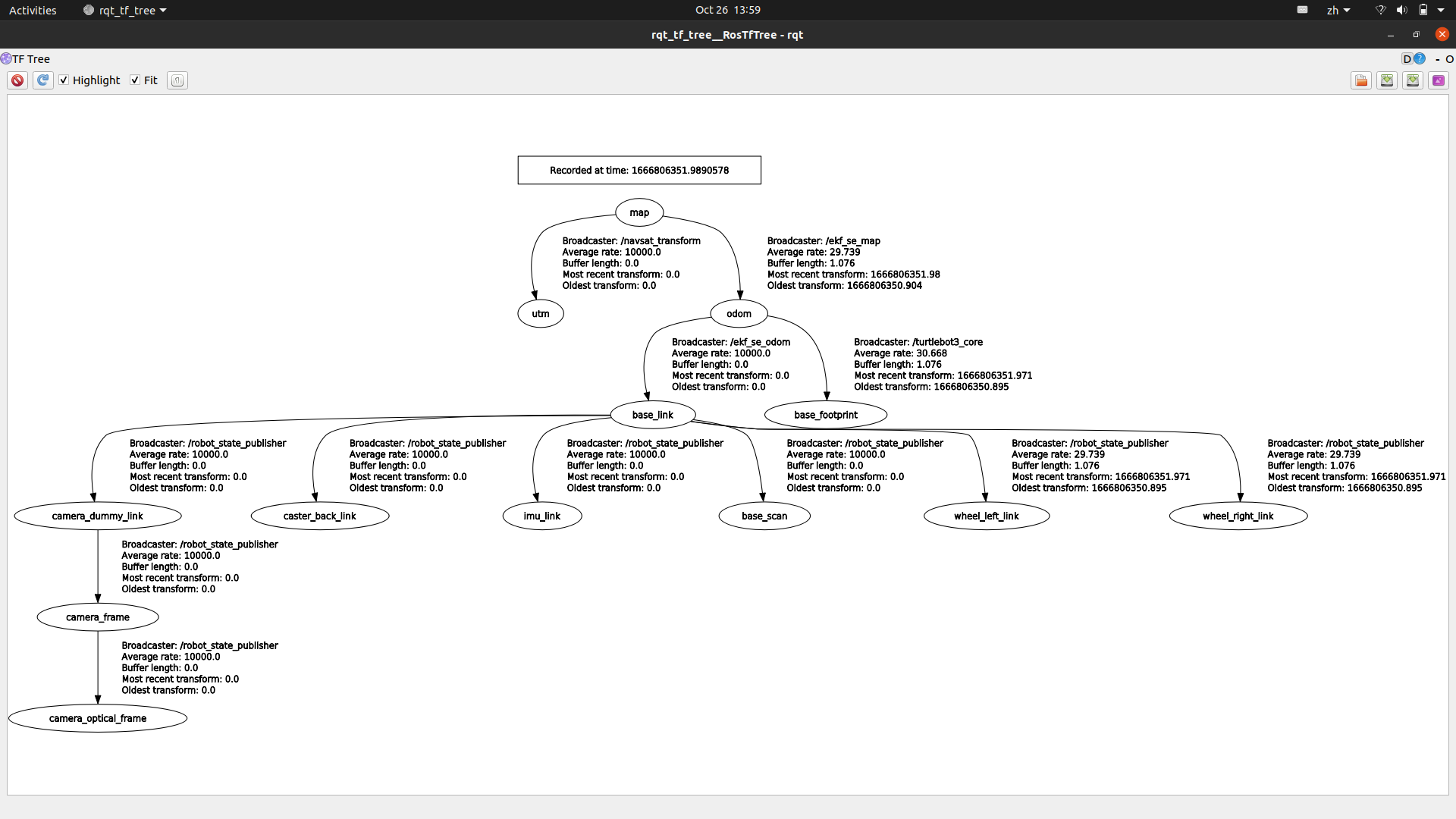
 tf tree
tf tree
You could also see the images, more details and a bag file here: https://drive.google.com/drive/folder...
the most recent launch files and yaml file
ekf yaml https://github.com/AutoPlow/TurtleBot...
dual_ekf_navsat_example.launch https://github.com/AutoPlow/TurtleBot...
turtlebot3_navigation.launch https://github.com/AutoPlow/TurtleBot...
I have also modified the turtlebot controller code where I disabled its original IMU: https://github.com/AutoPlow/TurtleBot...
a video that describes the issue: https://www.youtube.com/watch?v=dO-2o...
Your suggestions would be much appreciated!
Thanks,
related questions: https://answers.ros.org/question/3424... https://answers.ros.org/question/3725...

{kind=link}