
AprilTags not detected when close to camera
Hello,
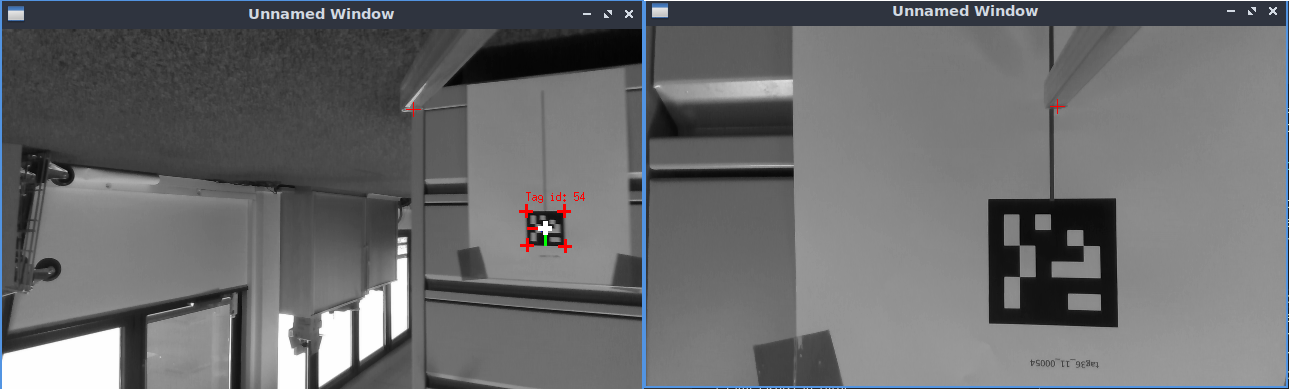
I can detect AprilTags that are "far" from the camera, ie. small on the image and even a little blur, but the detection fails when the tags are close to the camera and when the image is clean and neat, what is counter-intuitive.
Is this expected ? How can I detect the tags at all scales ?
NB1: Interestingly, if I increase the "quad-decimate" param form default 1.0 to e.g. 16.0 (to reduce the image resolution), I can detect the "close" tag but not the "far" one (seems logical to not detect the small).
NB2: I use the VISP C++ lib directly, not the ROS apriltag packages, and images with 640x360 images
add a comment
