
How to use robot_lokalization package for mobile robot lokalization in gazebo?
Hi
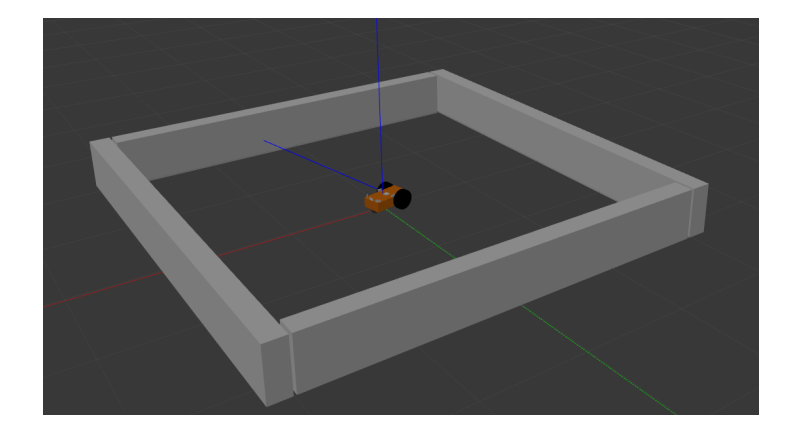
I have a mobile robot with dimension and sensor configuration (five sonar ultrasonic sensors and one IMU-9 degree of freedom) as in this photos here mobile robot in gazebo. The mobile robot is using the model of differential driving motion with mixing of sensory(sonar and IMU) information. I would like to use the ROS lokalization package to lokalize the robots. Here the photos of the robot and the gazebo world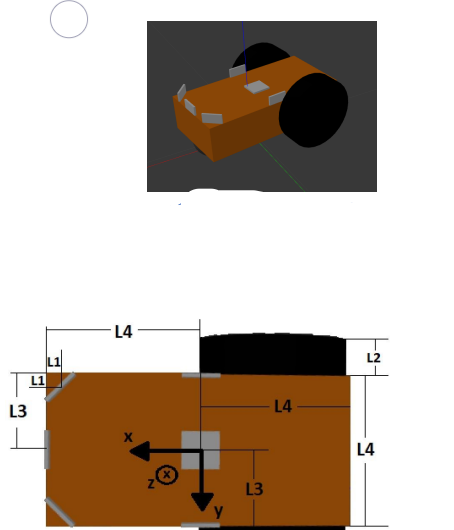
 . The sonar sensors can measure distance to the wall(obstacle) and IMU can measure measures rotational speeds, linear accelerations, as well as rotation around each axis.
. The sonar sensors can measure distance to the wall(obstacle) and IMU can measure measures rotational speeds, linear accelerations, as well as rotation around each axis.
I would like to use robot_lokalization package robot_lokalization for estimating the position and orientation of the moving robot, described above, in a space of known dimensions (4m x4m) as in the gazebo picture The robot will perform random walking motion (and avoid obstacles-walls) in the space for a period of lets say 1 minute So will use (localization) in each time step of the movement, using the model of differential driving motion with mixing of sensory information (sonars, IMU) and ros_tracking package tracking pid.
The initial arrangement of the robot will start from the center of the movement space (x, y) = (0,0). Any helps with the implementation and the ros node? Can be in C++ or python
Thanks
