
TF tree for nav2
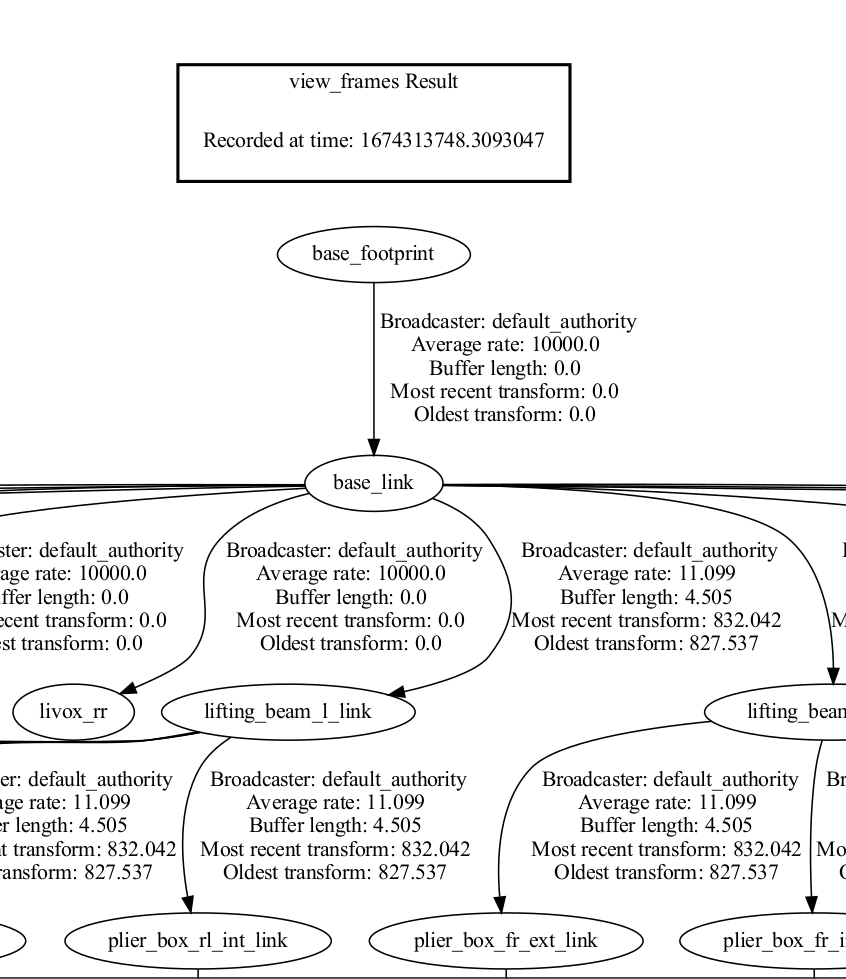
I have a mobile robot, and I readed REP 103, 105 and 120 and still confused. This is my actual tf tree where base_footprint is the parent of base_link, is that correct? (omit the map->odom tf)
in an answer here, it says that base_footprint can be parent or child of base_link
So my final question is, is correct the following tf tree?
map->odom->base_footprint->base_link->sensors
add a comment
