
NAV2 - Gazebo does not load model

Hi there,
I am running this tutorial https://navigation.ros.org/getting_st... I am using ROS2 Foxy in Ubuntu 20.04 and Gazebo 9
I have exported the models as the tutorial explains:
source /opt/ros/<ros2-distro>/setup.bash
export TURTLEBOT3_MODEL=waffle
export GAZEBO_MODEL_PATH=$GAZEBO_MODEL_PATH:/opt/ros/<ros2-distro>/share/turtlebot3_gazebo/models
However, Gazebo is not loading:
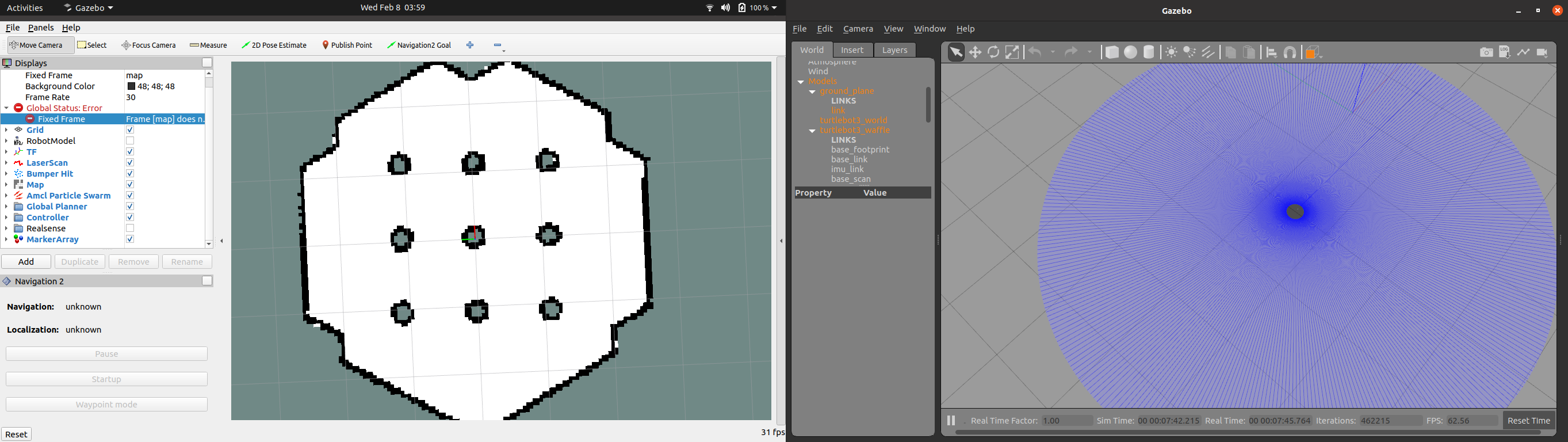
I should have this behavior at the end when setting a 2D goal pose to the robot:
https://navigation.ros.org/_images/na...
But I am not having success in localizing the robot...
add a comment



{kind=link}