
Failed to receive current joint state
Hi,
I am working on the motion planning of a 6 DOF robotic arm using ROS (noetic) framework. I am able to do the motion planning successfully. But, as you can see in the below terminal output
[ INFO] [1686852131.819854441, 23.953000000]: arm_manipulator/arm_manipulator: Created 4 states (2 start + 2 goal)
[ INFO] [1686852131.819936604, 23.953000000]: Solution found in 0.103761 seconds
[ INFO] [1686852132.031752953, 24.051000000]: SimpleSetup: Path simplification took 0.211746 seconds and changed from 3 to 2 states
[ INFO] [1686852132.039613320, 24.054000000]: Execution request received
[ INFO] [1686852136.439077780, 25.359000000]: Controller 'arm_manipulator_controller' successfully finished
[ INFO] [1686852137.439815202, 25.735000000]: Didn't receive robot state (joint angles) with recent timestamp within 0.458999 seconds.
Check clock synchronization if your are running ROS across multiple machines!
[ WARN] [1686852137.439934001, 25.735000000]: Failed to receive current joint state
[ INFO] [1686852137.440010160, 25.735000000]: Completed trajectory execution with status SUCCEEDED ...
[ INFO] [1686852137.440103739, 25.735000000]: Execution completed: SUCCEEDED
I am getting a warning message that
[ INFO] [1686852137.439815202, 25.735000000]: Didn't receive robot state (joint angles) with recent timestamp within 0.458999 seconds. Check clock synchronization if your are running ROS across multiple machines!
[ WARN] [1686852137.439934001, 25.735000000]: Failed to receive current joint state
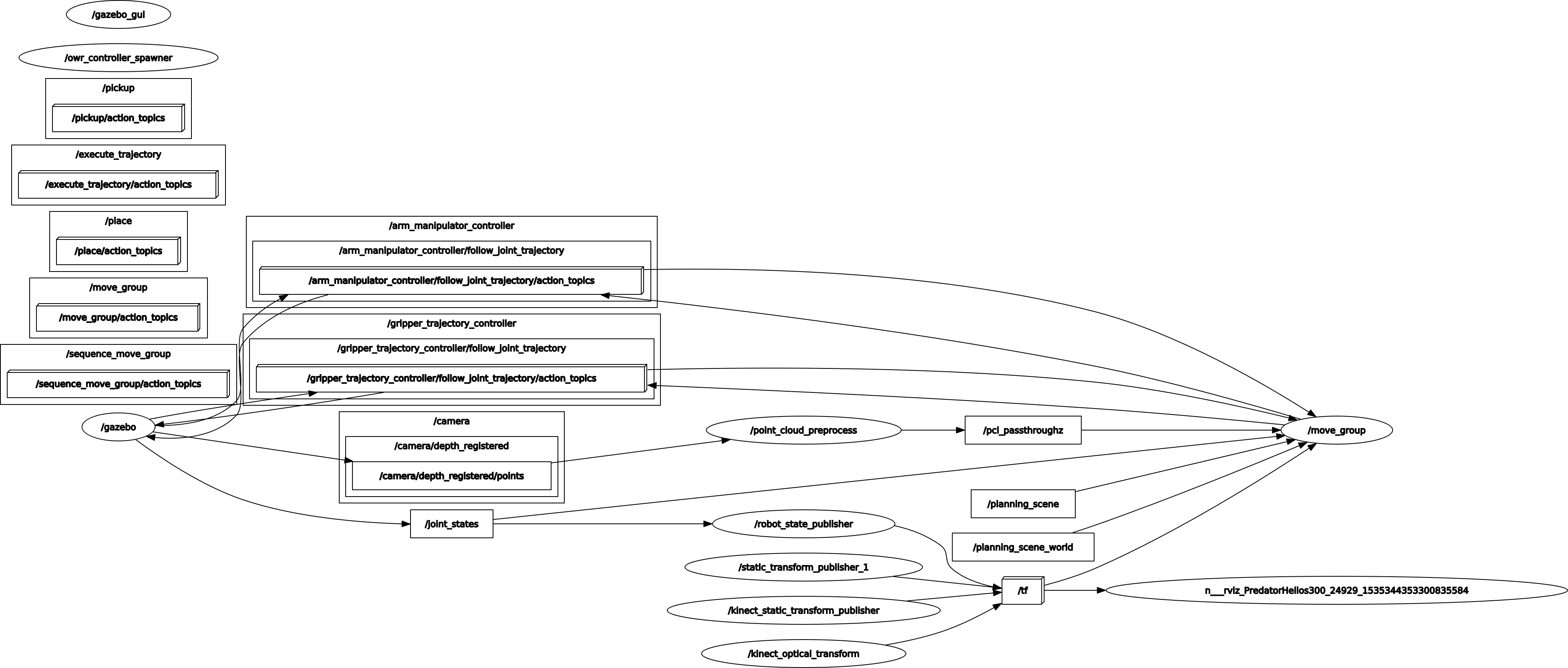
This is strange since this topic is correctly configured and I am getting data on /joint_states topic (Freq 50Hz). Please check below rosgraph:
I would like to know
- Why am I getting above warning message when the
/joint_statestopic seems to be working correctly? - Is there any implication of above warning on the motion planning of my robotic arm? Or can I simply ignore it?
- Is it related to
joint_state_controller/publish_rate(50 Hz)?
I would really appreciate any help.

Are you using hardware or simulation? If later, are you consistently setting
use_sim_time? Check the timestamps on relevant messages to be sure they are consistent. If using multiple machines on real time, ensure they are time synced properlyI am doing MP in simulation. Also, setting
use_sim_time=true. Not using multiple machines but running in Virtual box.I'd double check the timestamps on relevant topics and action goals. I ran into issue before where the use_sim_time was not set properly unless I set via launch file.