
How to read Roll and Pitch with Turtlebot3?
I am using the Turtlebot3 with ROS2 Foxy and I can't read the Roll and Pitch, just the Yaw. I'm using this launch: roslaunch turtlebot3_bringup turtlebot3_robot.launch
and the result is:
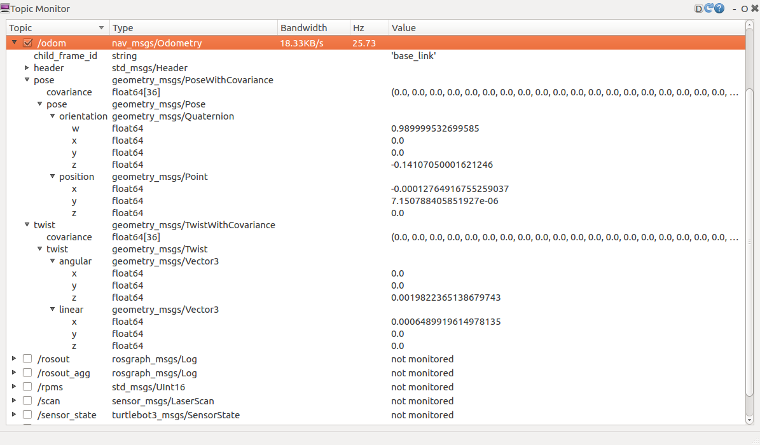
Which is the same result presented at the documentation
I tested, my opencr itself and it really has the gyroscope to read the 3-axis.
So, what I have to do to have access to the Roll and Pitch?
add a comment
