
Nav2 controller server high CPU load
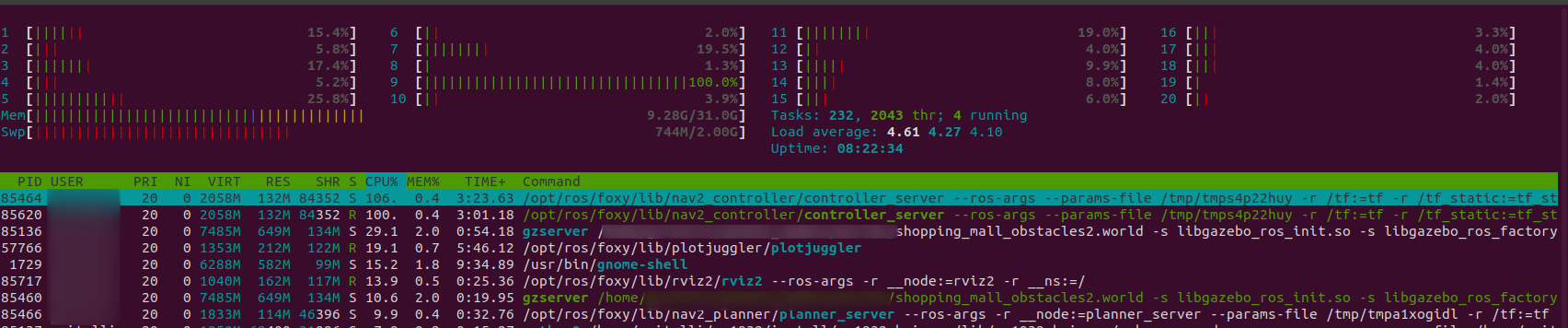
I'm struggling to understand why the controller server is taking so much CPU (12th get i9-12900H) even when not navigating at all.
Here is my nav_params.yaml
I can share more info if needed, but, hopefully, I can get some pointers so I can start looking more into it since as of now I have no idea where to start from.
Thank you in advance
amcl:
ros__parameters:
use_sim_time: True
alpha1: 0.2
alpha2: 0.2
alpha3: 0.2
alpha4: 0.2
alpha5: 0.2
base_frame_id: "base_link"
beam_skip_distance: 0.5
beam_skip_error_threshold: 0.9
beam_skip_threshold: 0.3
do_beamskip: false
global_frame_id: "map"
lambda_short: 0.1
laser_likelihood_max_dist: 2.0
laser_max_range: 20.0
laser_min_range: 0.1
laser_model_type: "likelihood_field"
max_beams: 60
max_particles: 2000
min_particles: 500
odom_frame_id: "odom"
pf_err: 0.05
pf_z: 0.99
recovery_alpha_fast: 0.0
recovery_alpha_slow: 0.0
resample_interval: 1
robot_model_type: "differential"
save_pose_rate: 0.5
sigma_hit: 0.2
tf_broadcast: true
transform_tolerance: 1.0
update_min_a: 0.2
update_min_d: 0.25
z_hit: 0.5
z_max: 0.05
z_rand: 0.5
z_short: 0.05
scan_topic: scan
amcl_map_client:
ros__parameters:
use_sim_time: True
amcl_rclcpp_node:
ros__parameters:
use_sim_time: True
bt_navigator:
ros__parameters:
use_sim_time: True
global_frame: map
robot_base_frame: base_link
# odom_topic: /odometry/filtered
odom_topic: /wheel/odometry
transform_tolerance: 0.3
enable_groot_monitoring: True
groot_zmq_publisher_port: 1666
groot_zmq_server_port: 1667
# default_bt_xml_filename: "navigate_w_replanning_and_recovery.xml"
default_bt_xml_filename: "navigate_w_replanning_and_round_robin_recovery"
# default_bt_xml_filename: "simple_navigation_gfr.xml"
# default_bt_xml_filename: "follow_point.xml"
# default_bt_xml_filename: "followpath_only.xml"
plugin_lib_names:
- nav2_compute_path_to_pose_action_bt_node
- nav2_follow_path_action_bt_node
- nav2_back_up_action_bt_node
- nav2_spin_action_bt_node
- nav2_wait_action_bt_node
- nav2_clear_costmap_service_bt_node
- nav2_is_stuck_condition_bt_node
- nav2_goal_reached_condition_bt_node
- nav2_goal_updated_condition_bt_node
- nav2_initial_pose_received_condition_bt_node
- nav2_reinitialize_global_localization_service_bt_node
- nav2_rate_controller_bt_node
- nav2_distance_controller_bt_node
- nav2_speed_controller_bt_node
- nav2_truncate_path_action_bt_node
- nav2_goal_updater_node_bt_node
- nav2_recovery_node_bt_node
- nav2_pipeline_sequence_bt_node
- nav2_round_robin_node_bt_node
- nav2_transform_available_condition_bt_node
- nav2_time_expired_condition_bt_node
- nav2_distance_traveled_condition_bt_node
bt_navigator_rclcpp_node:
ros__parameters:
use_sim_time: True
planner_server:
ros__parameters:
planner_plugins: ["GridBased"]
use_sim_time: True
GridBased:
plugin: "smac_planner/SmacPlanner"
tolerance: 0.5
downsample_costmap: false
downsampling_factor: 1
allow_unknown: true # false
max_iterations: -1
max_on_approach_iterations: 1000
max_planning_time_ms: 2000.0
smooth_path: true
motion_model_for_search: "REEDS_SHEPP"
angle_quantization_bins: 72
minimum_turning_radius: 1.6
reverse_penalty: 5.0
change_penalty: 0.
non_straight_penalty: 1.05
cost_penalty: 1.3
smoother:
smoother:
w_curve: 30.0 # weight to minimize curvature of path
w_dist: 0.0 # weight to bind path to original as optional replacement for cost weight
w_smooth: 30000.0 # weight to maximize smoothness of path
w_cost: 0.025 # weight to steer robot away from collision and cost
cost_scaling_factor: 10.0 # this should match the inflation layer's parameter
# I do not recommend users mess with this unless they're doing production tuning
optimizer:
max_time: 0.10 # maximum compute time for smoother
max_iterations: 500 # max iterations of smoother
debug_optimizer: false # print debug info
gradient_tol: 1.0e-10
fn_tol: 1.0e-20
param_tol: 1.0e-15
advanced:
min_line_search_step_size: 1.0e-20
max_num_line_search_step_size_iterations: 50
line_search_sufficient_function_decrease: 1.0e-20
max_num_line_search_direction_restarts: 10
max_line_search_step_expansion: 50
planner_server_rclcpp_node:
ros__parameters:
use_sim_time: True
controller_server:
ros__parameters:
use_sim_time: True
controller_frequency: 5.0
min_x_velocity_threshold: 0.01 # Odometry values below this threshold (in m/s) will be set to 0.0.
min_y_velocity_threshold: 0.0
min_theta_velocity_threshold: 0.01
failure_tolerance: 0.5
# odom_topic: /odometry/filtered
odom_topic: /wheel/odometry
progress_checker_plugin: "progress_checker"
goal_checker_plugins: ["goal_checker"]
controller_plugins: ["FollowPath"]
progress_checker:
plugin: "nav2_controller::SimpleProgressChecker"
required_movement_radius: 0.001
movement_time_allowance: 20.0
goal_checker:
plugin: "nav2_controller::SimpleGoalChecker"
xy_goal_tolerance: 0.2 # 0.25
yaw_goal_tolerance: 0.1 #0.25
stateful: True
# TEB parameters
# http://wiki.ros.org/teb_local_planner
FollowPath:
plugin: "teb_local_planner::TebLocalPlannerROS"
odom_topic: odom
map_frame: map
dt_ref: 0.3
dt_hysteresis: 0.05
exact_arc_length: True ...

You might want also to take a look to the memory. RAM is full and swap memory almost too.
not following, they seem both <50%...