
Problem with Gazebo after update.

Hello,
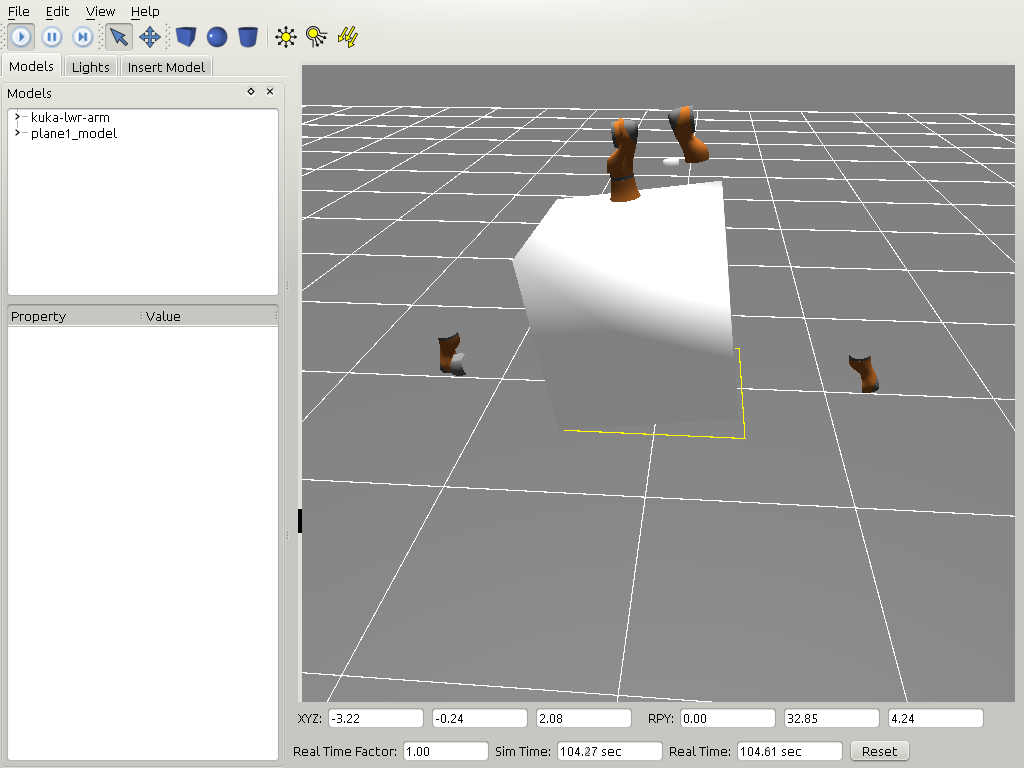
I updated gazebo today (from apt (ubuntu 12.04)) and when i load one of my robots to gazebo all of the robot parts appear in random places.
URDF for my robot is located in : https://github.com/RCPRG-ros-pkg/lwr_robot/tree/electric/lwr_defs
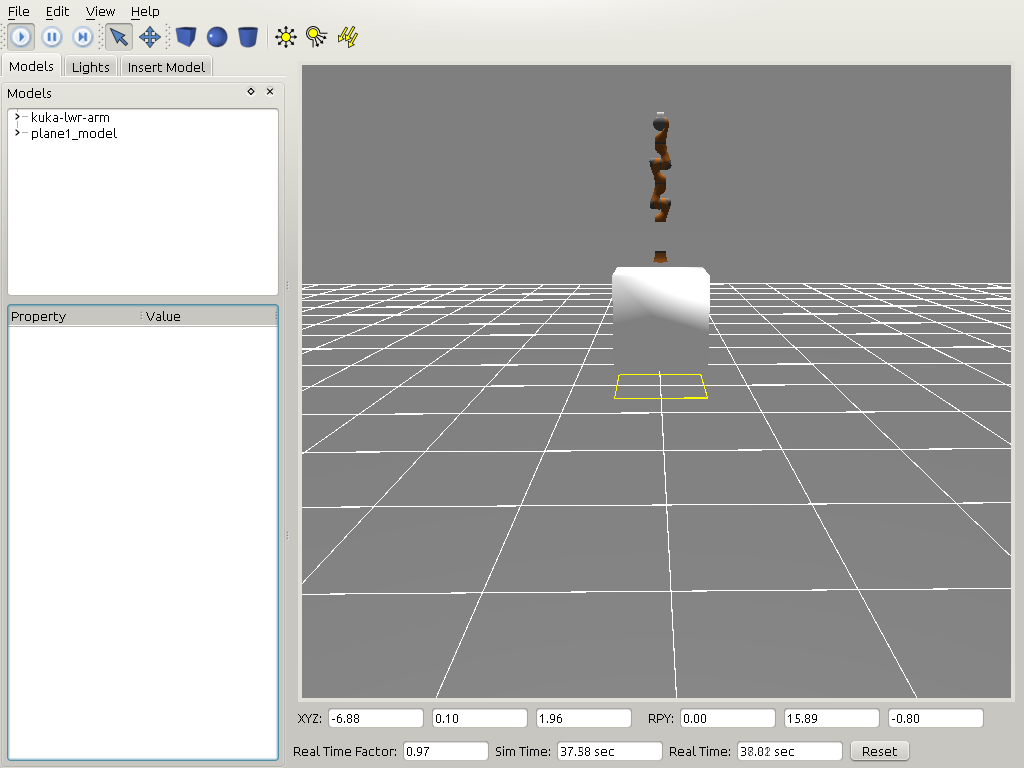
After updating to svn trunk it works much better.
But that not solve all of my problems, the second robot link appear translated from its base. It looks like a problem with chaining of fixed links. When i remove the world link and world to world_link joint the offset disappear.
add a comment
