
inferring missing objects
Hi, i begin to do asimple robot that can inferring missing objects on the table like that :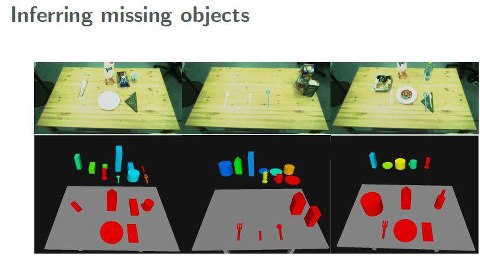
firstly i want to list all i need to do this 1- kinect : can i use any type of kinect or must openni kinect ? or can i use a normal camera ?? why ?
2- the simulation in the picture up is it gazebo ?? how can i link my simulation with reasoning and knowrob ??
3- the relation between my simulation and the picture captuered by my kinect or camera ?
Thanks :)

too little info. where do you get this picture?
it is a simple target using kinect or camera to just inferring missing component using semantic mapping for objects ,this picture from pdf in semantic
this pdf http://www.mediafire.com/view/?8ujbn5q7gqowk9v