learning_tf turtlesim tutorial: second turtle twirling

Hi guys,
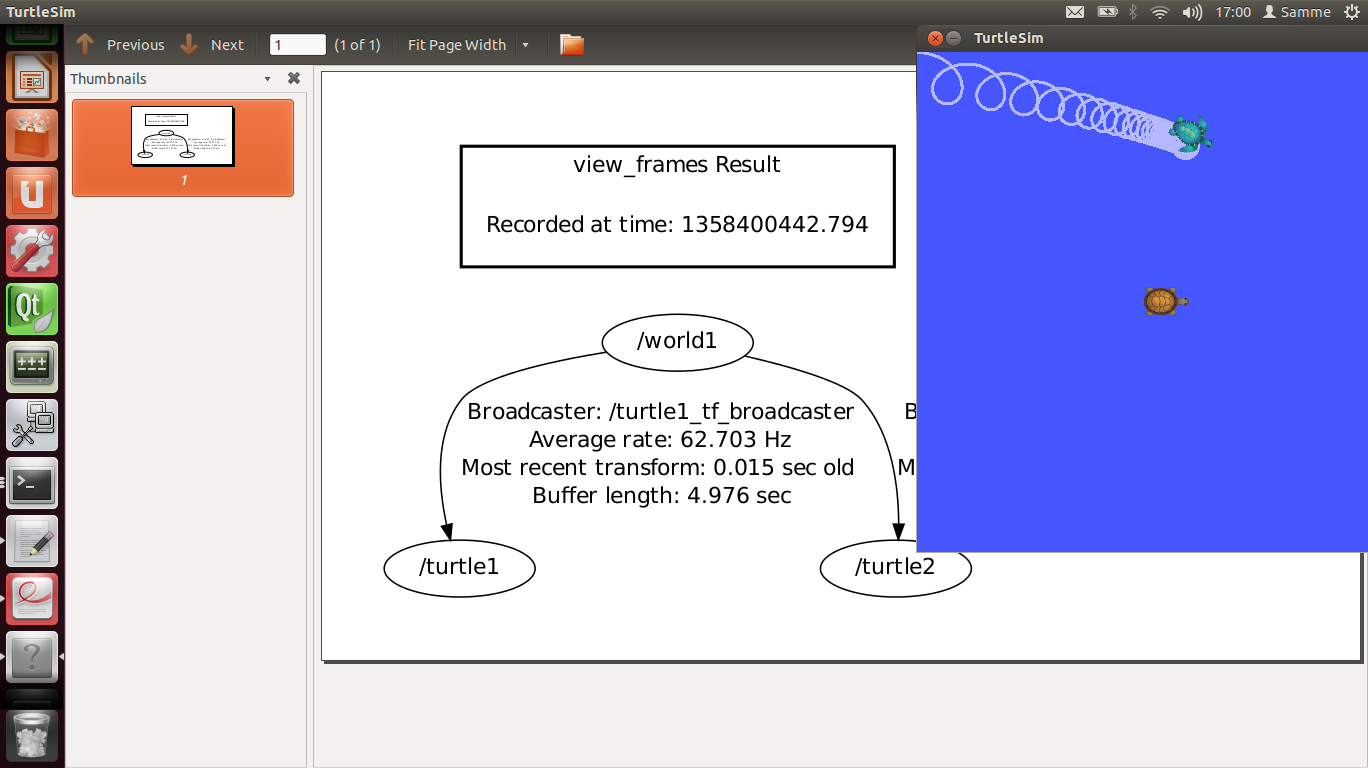
I have followed the tf tutorials and implemented all the instructions to get the second turtle to follow the first turtle which in turn is controlled via the keyboard, however, when I launch the start_demo.launch, the second turtle starts twirling continuously even without moving the first turtle.
When I move the first turtle, I can see that the second turtle changes its movement slightly while still rotating. I am not sure what the problem is. I have attached an image showing the pdf file created by rosrun tf view_frames and the turtlesim. Heres what I get:
$ rosrun tf view_frames Listening to /tf for 5.000000 seconds Done Listening Exception AttributeError: AttributeError("'_DummyThread' object has no attribute '_Thread__block'",) in <module 'threading'="" from="" '="" usr="" lib="" python2.7="" threading.pyc'=""> ignored dot - graphviz version 2.26.3 (20100126.1600)
Detected dot version 2.26.3 Exception AttributeError: AttributeError("'_DummyThread' object has no attribute '_Thread__block'",) in <module 'threading'="" from="" '="" usr="" lib="" python2.7="" threading.pyc'=""> ignored frames.pdf generated
Any help would be much appreciated.
regards,
Khalid