
link between detection algorithm and the knowledge base in Knowrob
Hi all , I am working on an Roboearth application like Amigo who use roboearth to download object models to do a task
I am working now on detection package that detect the requested Object .
I tried re_object_detector_gui package that use the re_kinect_object_detector algorithm
BUT ,, this gui is manually by user choose or download the object model
1- How can i use the detect algorithm re_kinect_object_detector without this gui
by automatic detect the correspond object when i ask it for a cup for example this query search on knowrob data set and the result model detected by the detection algorithm ?
2- i wanna a sequence of how this process working like : first ,query from the user by .. Second : search in the knowledge base using ... third : if he found the model that match my request detect it by ... etec ...
thanks :)
Edited :
I made a simple talker node that publish an object model path in the re_kinect/model_path (std_msgs/String)
see the code :
#include "ros/ros.h"
#include "std_msgs/String.h"
#include <sstream>
int main(int argc, char **argv)
{
ros::init(argc, argv, "talker");
ros::NodeHandle n;
ros::Publisher chatter_pub = n.advertise<std_msgs::String>("re_kinect/model_path", 1000);
ros::Rate loop_rate(10);
int count = 0;
while (ros::ok())
{
std_msgs::String msg;
std::stringstream ss;
ss << "/home/turtlebot/Desktop/drink.b5ero_kinect" << count;
msg.data = ss.str();
ROS_INFO("%s", msg.data.c_str());
}
}
and rosmaked it with no error then :
1- run the openni launch
2- run the talker node , it returns the string of the model path
3- run the re_kinect node detector to detect
but it returns :
turtlebot@turtlebot-HP-Compaq-tc4400-EY609EA-ABB:~$ rosrun re_kinect_object_detector re_kinect
[ WARN] [1361999828.637136682]: no model files loaded!
how can it load the fixed model path i have entered all the time i run the detector ? where is the wrong ?
and that is the rxgraph for it :
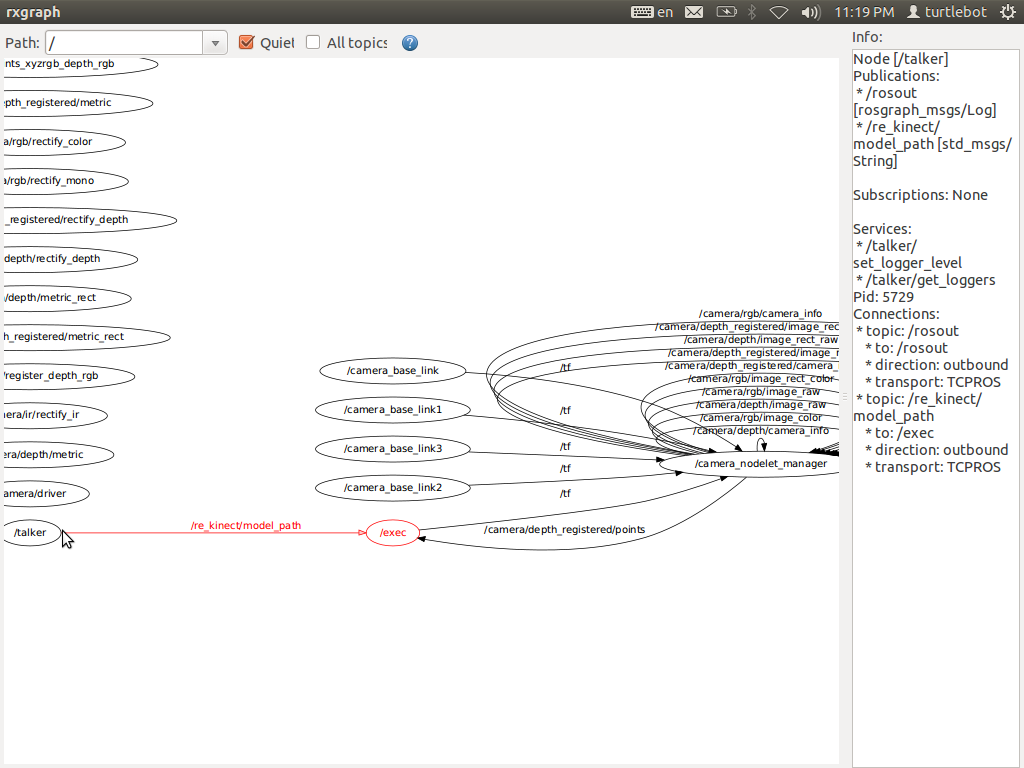
thanks :)
