
RoboEarth scanning issues
Hi,
we are trying to scan and recognize 3D objects with the Kinect and RoboEarth. For the model scanning we followed the video tutorial from RoboEart, resp. the guide from the wiki which results in very bad models. The image below shows a full 3D scan.
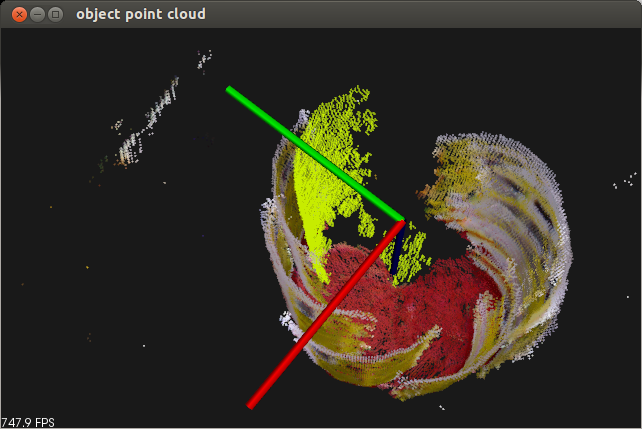
You can see that the different scans are very bad aligned and we just cant figure out why. The Kinect cameras (both rgb and ir) are calibrated with the ros calibration tool. When starting the re_object_recorder there comes an error saying that the depth_registration of openni is not activated (Depth registration is disabled in the openni driver. This will probably lead to badly aligned pointclouds.). After some reading I suppose this error is deprecated, because depth_registration is turned on automatically when openni_launch finds a configuration file for the cameras (according to the documentation). Setting depth_registration to true will result in empty depth_images anyway (another bug within openni).
Another strange issue with the scanning is the reprojection of the recognized marker:
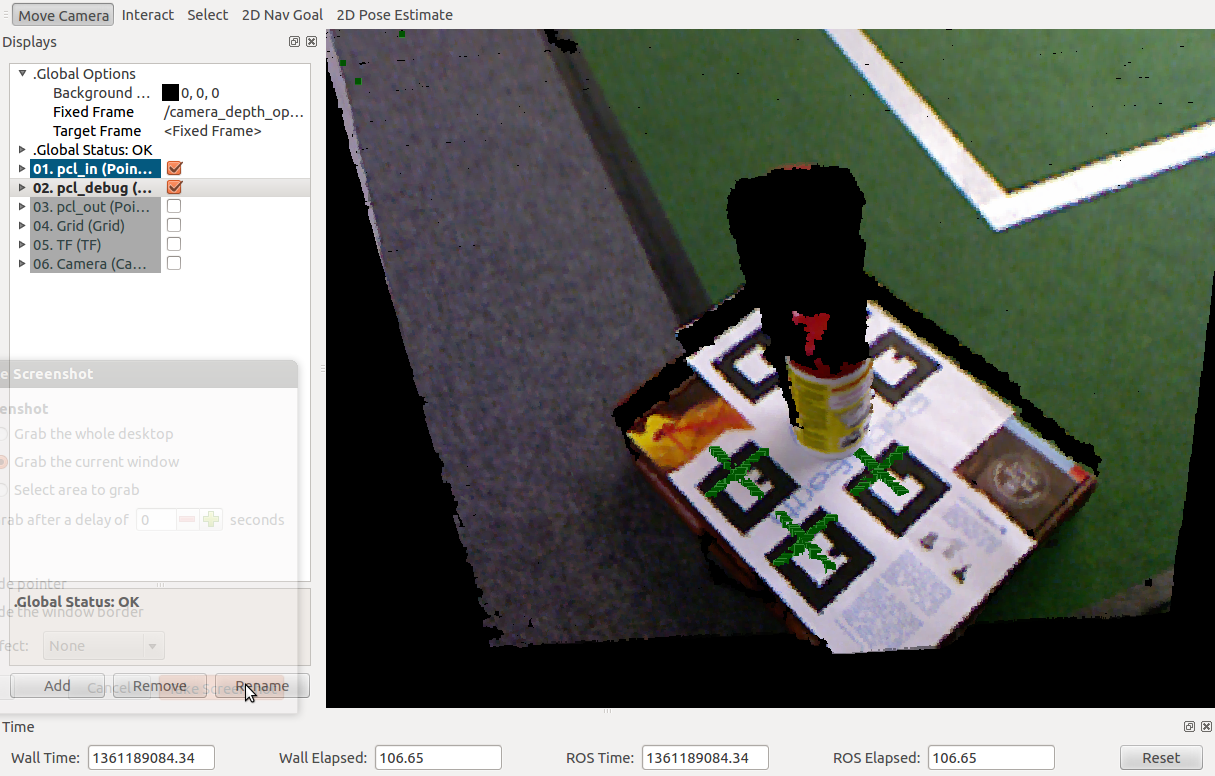
But maybe this is just because the marker are backprojected onto the rectified data ...?
I just cant image whats going wrong here. Maker patterns are printed correctly, the setup is exactly as proposed in the tutorial and the Kinect is calibrated. By using markers for pose estimation of the Kinect, the error of the scan alignment should not even be visible.
System:
- ros fuerte Ubuntu 12.4 LTE
- OpenNI-Bin-Dev-Linux-x86-v1.5.4.0 (compiled from source)
- Sensor-Bin-Linux-x86-v5.1.2.1 (compiled from source)
- stacks/roboearth -r2235 ipvs.informatik.uni-stuttgart.de/roboearth/repos/public/ -
- openni_launch hg a6468e10ba4c bitbucket.org/lubosz/openni_launch
- openni_camera hg a195c7630f52 bitbucket.org/lubosz/openni_camera

I am having the same issue. If I set
depth_registrationtofalseI can try to build the model but the result is similar to yours. If I set it totrueI am gettingno point cloud found inside the bounding box above the marker pattern.warning and the points do not come through.