
openni_tracker displaying pointcloud and skeleton alignment?

I have openni_tracker working. However, I am not sure how I can visualize both point cloud from Kinect as well as the skeleton TF data.
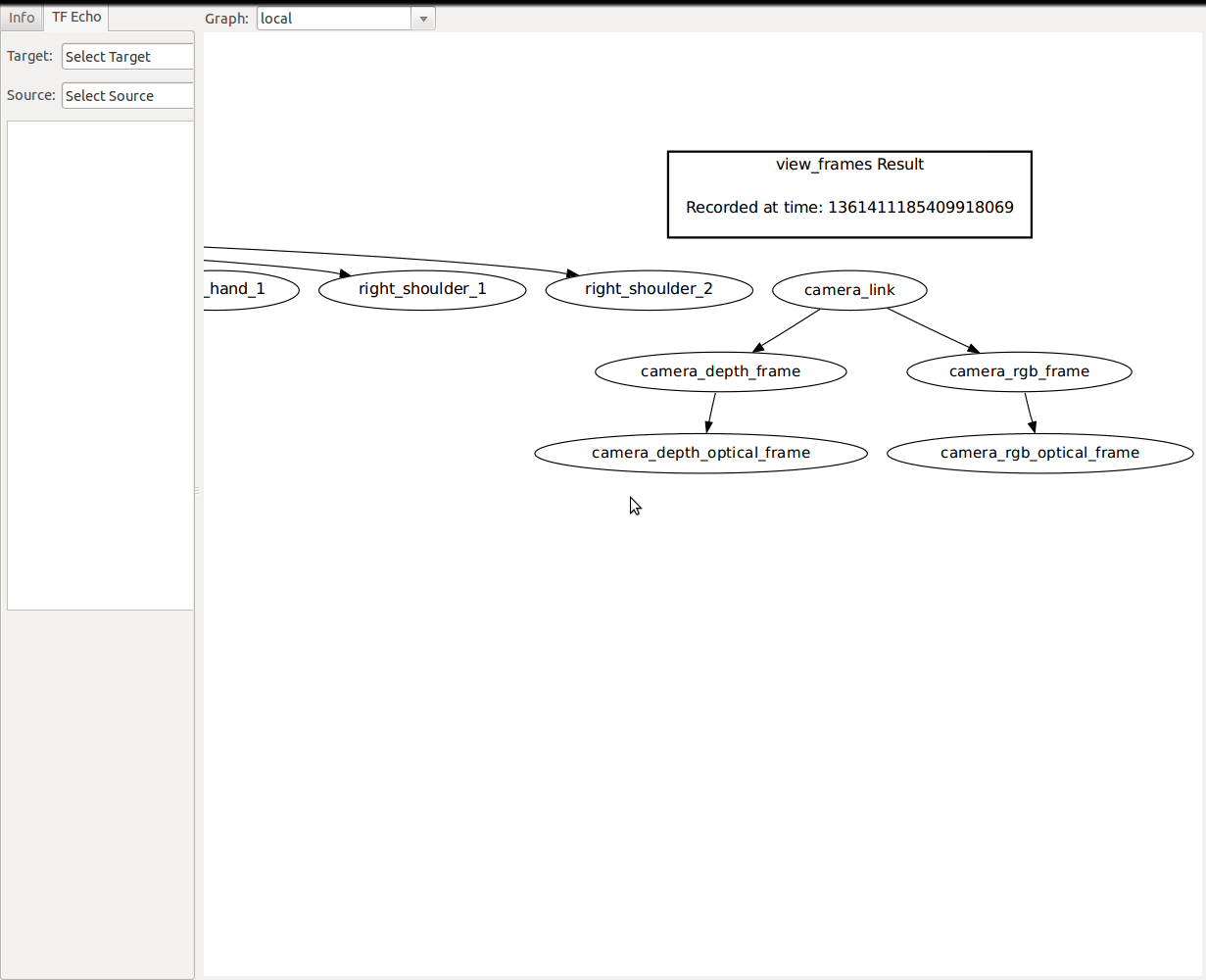
I can visualize Kinect point cloud by setting fixed frame to /camera_link
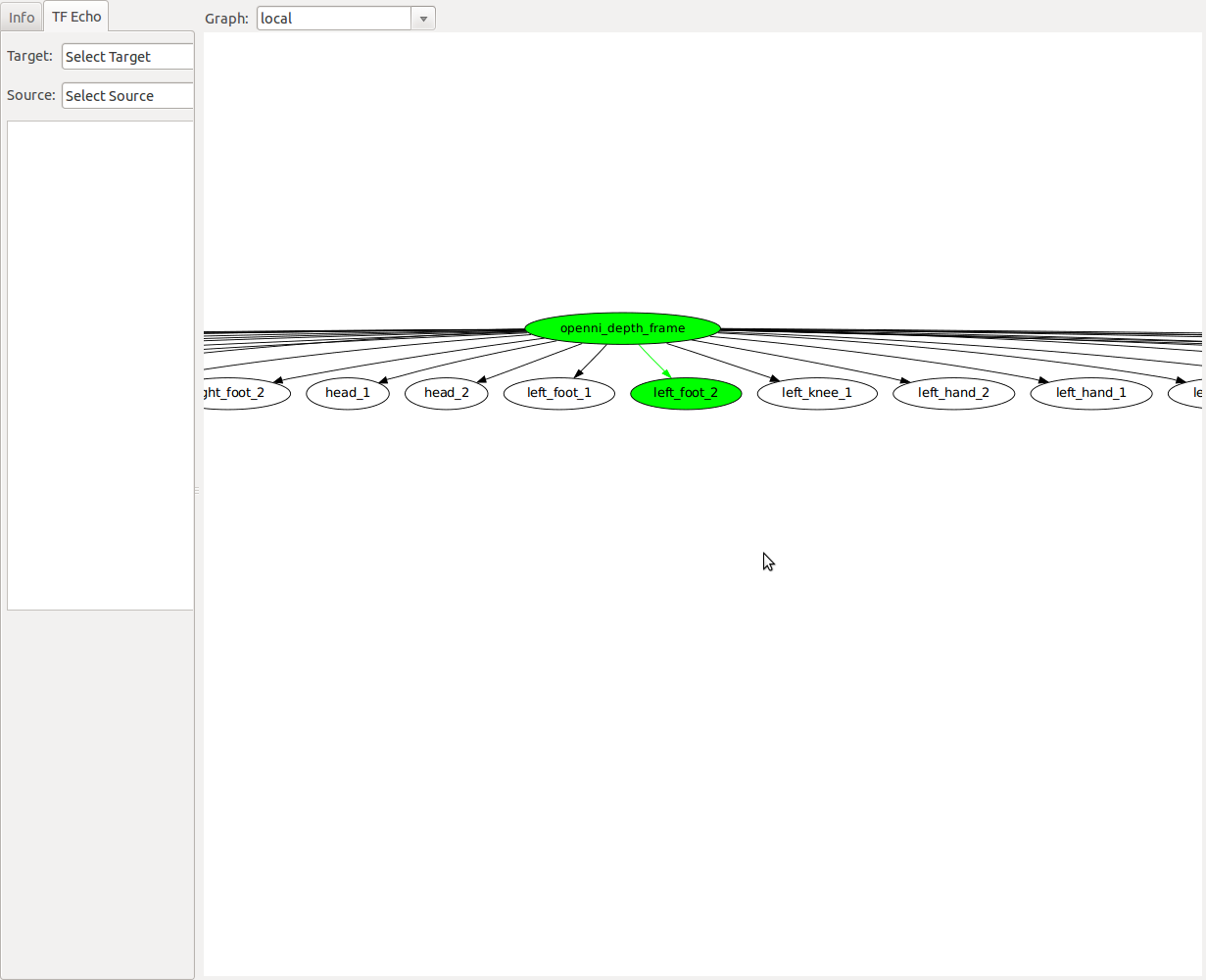
And I can visualize TF skeleton data by setting fixed frame to /openni_depth_frame.
When I visualize TF data, there is no connection between point cloud related TF and skelecton related TF data. Am I doing something wrong?
How could I align these together?
add a comment
