
Delay in tf broadcaster robot_pose_ekf

I'm trying to run Turtlebot using a fixed Kinect in the room, but I have some Tf issues in rviz. I cannot visualize robot Tf after base_footprint but I can see the link by:
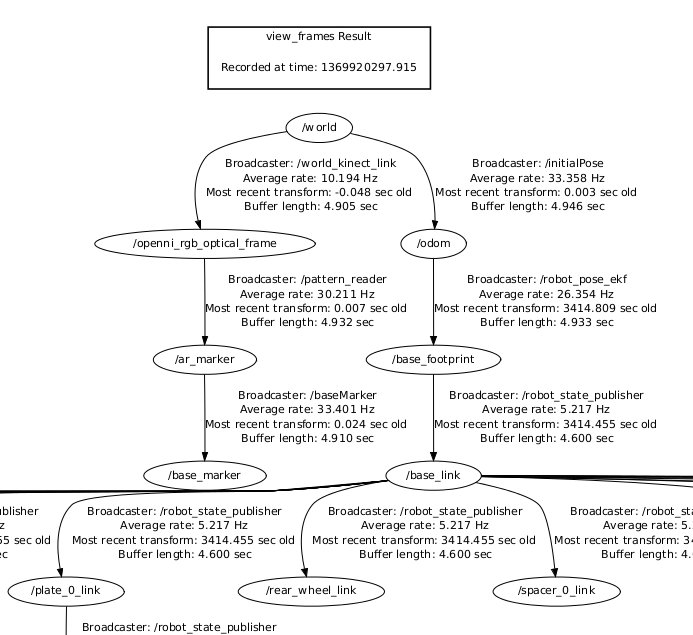
$rosrun tf view_frames
$rosrun tf tf_echo /odom /base_footprint
> At time 1369922387.939
> - Translation: [0.000, 0.000, 0.000]
> - Rotation: in Quaternion [0.000, 0.000, 0.000, 1.000]
> in RPY [0.000, -0.000, 0.000] At time 1369922388.974
> - Translation: [0.023, 0.001, 0.000]
> - Rotation: in Quaternion [0.000, 0.000, 0.070, 0.998]
> in RPY [0.000, -0.000, 0.140] At time 1369922389.940
> - Translation: [0.023, 0.001, 0.000]
> - Rotation: in Quaternion [0.000, 0.000, 0.070, 0.998]
> in RPY [0.000, -0.000, 0.140]
I can see some delay issues by tf_monitor: RESULTS: for all Frames
Frames: Frame: /ar_marker published by /pattern_reader Average Delay: 0.00499706 Max Delay: 0.0056474 Frame: /base_footprint published by /robot_pose_ekf Average Delay: 3415.33 Max Delay: 3415.36 Frame: /base_link published by /robot_state_publisher Average Delay: -0.486476 Max Delay: 0 Frame: /base_marker published by /baseMarker Average Delay: 0.000302851 Max Delay: 0.00233504 Frame: /camera_depth_frame published by /robot_state_publisher Average Delay: -0.486468 Max Delay: 0 Frame: /camera_depth_optical_frame published by /robot_state_publisher Average Delay: -0.486467 Max Delay: 0 Frame: /camera_link published by /robot_state_publisher Average Delay: -0.486478 Max Delay: 0 Frame: /camera_rgb_frame published by /robot_state_publisher Average Delay: -0.486466 Max Delay: 0 Frame: /camera_rgb_optical_frame published by /robot_state_publisher Average Delay: -0.486465 Max Delay: 0 Frame: /front_wheel_link published by /robot_state_publisher Average Delay: -0.486464 Max Delay: 0 Frame: /gyro_link published by /robot_state_publisher Average Delay: -0.486463 Max Delay: 0 Frame: /laser published by /robot_state_publisher Average Delay: -0.486462 Max Delay: 0 Frame: /left_cliff_sensor_link published by /robot_state_publisher Average Delay: -0.486475 Max Delay: 0 Frame: /left_wheel_link published by /robot_state_publisher Average Delay: 3414.33 Max Delay: 3414.34 Frame: /leftfront_cliff_sensor_link published by /robot_state_publisher Average Delay: -0.486473 Max Delay: 0 Frame: /odom published by /initialPose Average Delay: 0.000253598 Max Delay: 0.000583442 Frame: /openni_rgb_optical_frame published by /world_kinect_link Average Delay: -0.0998099 Max Delay: 0 Frame: /plate_0_link published by /robot_state_publisher Average Delay: -0.486461 Max Delay: 0 Frame: /plate_1_link published by /robot_state_publisher Average Delay: -0.48646 Max Delay: 0 Frame: /plate_2_link published by /robot_state_publisher Average Delay: -0.486459 Max Delay: 0 Frame: /plate_3_link published by /robot_state_publisher Average Delay: -0.486458 Max Delay: 0 Frame: /rear_wheel_link published by /robot_state_publisher Average Delay: -0.486457 Max Delay: 0 Frame: /right_cliff_sensor_link published by /robot_state_publisher Average Delay: -0.486472 Max Delay: 0 Frame: /right_wheel_link published by /robot_state_publisher Average Delay: 3414.33 Max Delay: 3414.34 Frame: /rightfront_cliff_sensor_link published by /robot_state_publisher Average Delay: -0.486471 Max Delay: 0 Frame: /spacer_0_link published by /robot_state_publisher Average Delay: -0.486456 Max Delay: 0 Frame: /spacer_1_link published by /robot_state_publisher Average Delay: -0.486455 Max Delay: 0 Frame: /spacer_2_link published by /robot_state_publisher Average Delay: -0.486454 Max Delay: 0 Frame: /spacer_3_link published by /robot_state_publisher Average Delay: -0.486453 Max Delay: 0 ...

