
SW2URDF how to generate linear axis [closed]
Hello everyone,
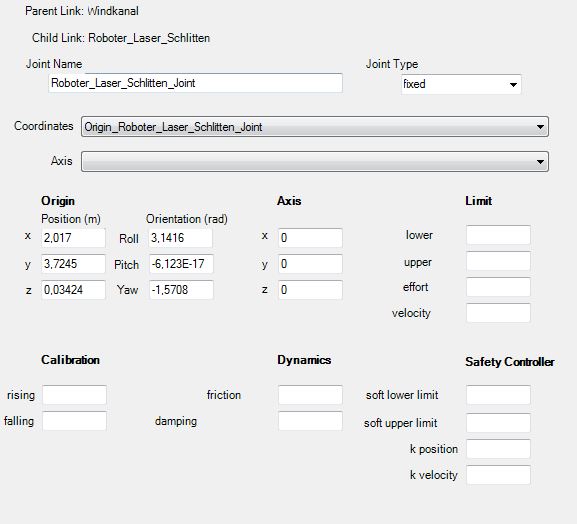
i want to simulate the shifting of several robots on a linear motion system. I´d like them all in one urdf file. I used standard mates to get it on the right position in SolidWorks 2012. Now i can sthift it along the linear motion system. When using the urdf exproter i am defining the motion system (Windkanal) as parent link and the blue part (Roboter_Laser_Schlitten) as child link.
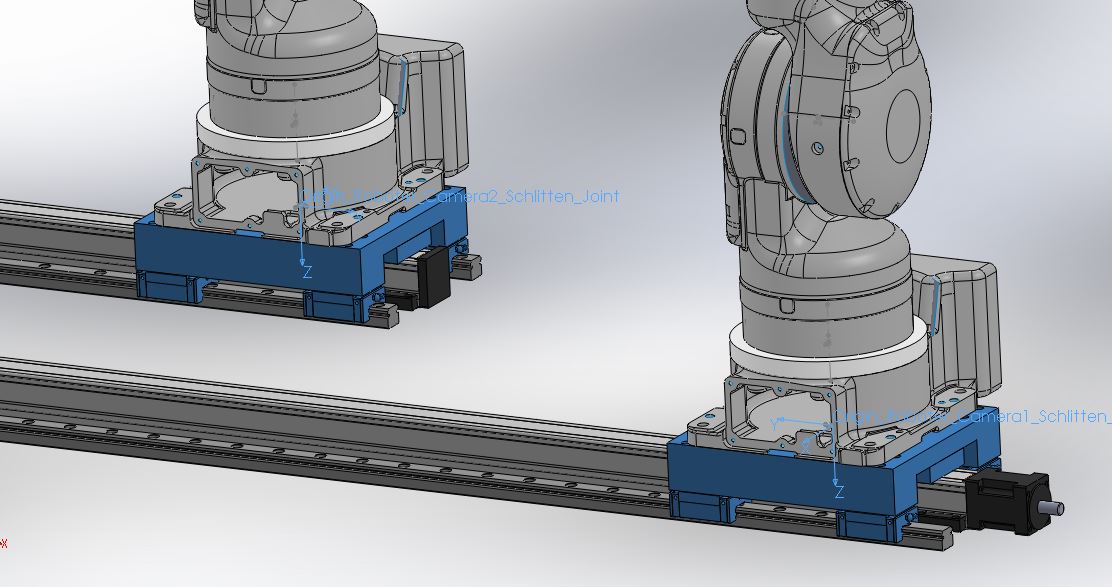
When the blue part is not fixed in the assembly, it does not export any axis or origins at all. I only get the origin_global. When the blue part is fixed it exports the origin of the blue part at least. But, of course, the joint is fixed. Is there any possibility of choosing another joint type and several axis so it will move as i would like it to move?
I am going to load the urdf file into moveit setup assistant, just in case this is important.
Thank you all for your help...
