
synchronized problem related to calibration

Hello All.
I Am a rookie in Ros, I am using ros fuerte and a monocular camera. My lapto's camera.
I want to know how many things I need to setup to make a retification image with image_proc package.
I already setup a launch file, I attached
But when I ran the image_view to display the image rectify, I got nothing. And when I ran the image_view to display the image mono, it works.
So I want to know what things I have to setup to do a rectification image. And what thing I did wrong.
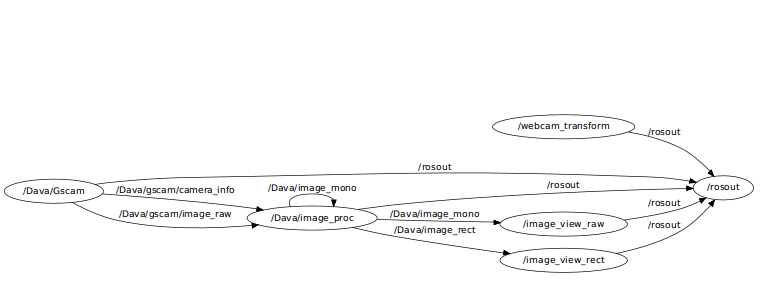
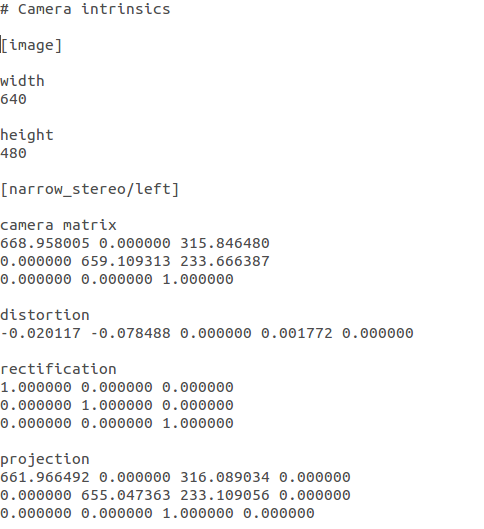
I attached the rxgraph output, my launch file and my camera parameters
Besides I have a warning:
[image_transport] Topics '/Dava/image_mono' and '/Dava/gscam/camera_info' do not appear to be synchronized. In the last 10s: Image messages received: 80 CameraInfo messages received: 80 Synchronized pairs: 0
I will appreciate any respond . Thank you
you can download the launch file to this link: https://mega.co.nz/#!fohxhQYY!RIuUOVuf1mL8Nn_erxkrujVt8zUmsLn-4_kP2YokMxc


{kind=link}
{kind=link}
What is the output of `rosconsole` when you start your launch file?
I just uploaded
Apparently the camera information is not correctly synchronized, this may be a bug of gscam. Also, camera information may be incorrect and rejected, hence the lack of data. Can you copy and paste in your original question two or three outputs of this topic?
@Thomas this is a bug from the old (svn) version of gscam, and has been fixed for months in the released version.