
NI Stack shows different outputs on Kinect
Hi,
So basically, if I build the sample source files such as NiSimpleViewer.cpp I see a clear disparity between depth and image data when I use DISPLAY_MODE_OVERLAY but when I run the binary Sample-NiSimpleViewer provided with the library I get a good overlap between the data
Am I missing something, do I have to calibrate my kinect manually and use those parameters? or if you have a link to the source on which the binary ni/ni/openni/bin/Sample-NiSimpleViewer is built on, please reply me. Thank you.
I initially assumed that the binaries provided in the stack ni @ ni/ni/openni/bin are actually built on code provided @ ni/ni/openni/build/openni/Samples but when I run ni/ni/openni/bin/Sample-NiSimpleViewer it gives a different output than ni/ni/openni/build/openni/Samples/NiSimpleViewer/NiSimpleViewer.cpp
Here are the images that I obtained from both
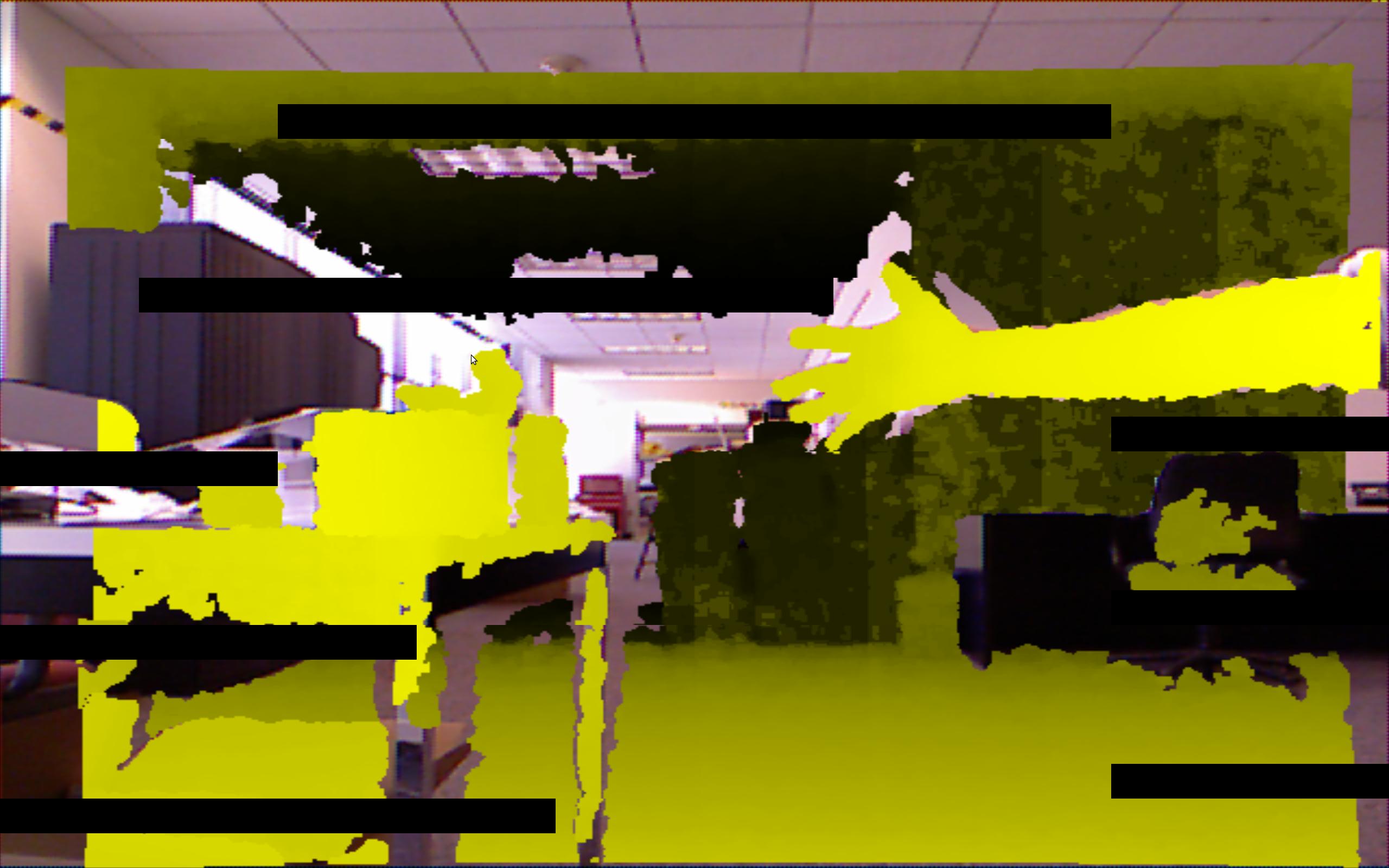

If you look at my hand in both the images then you can see a clear disparity.
[I am using diamondback on Ubuntu 10.04]
Best, CV

