shift in the map of gmapping
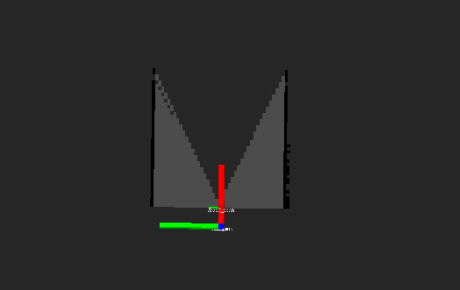
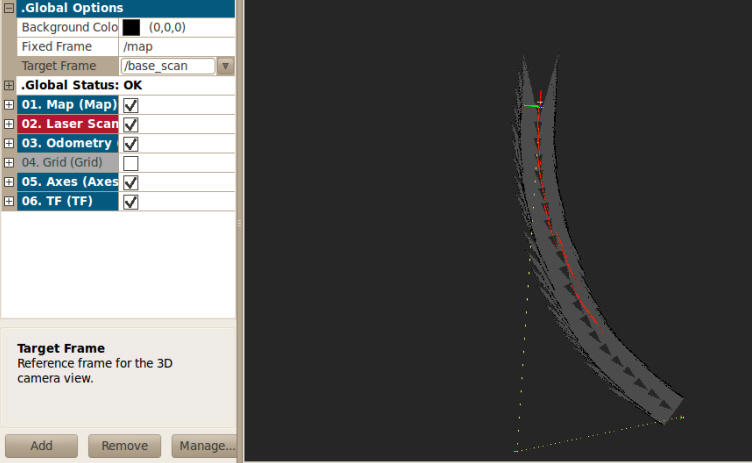
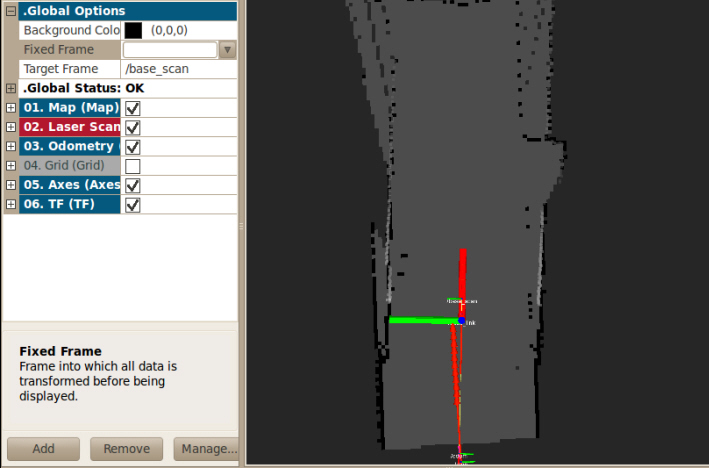
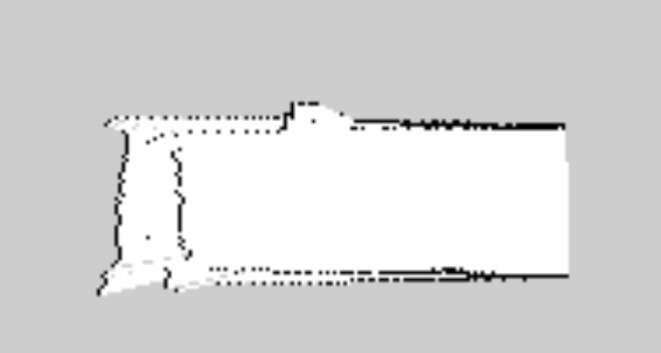
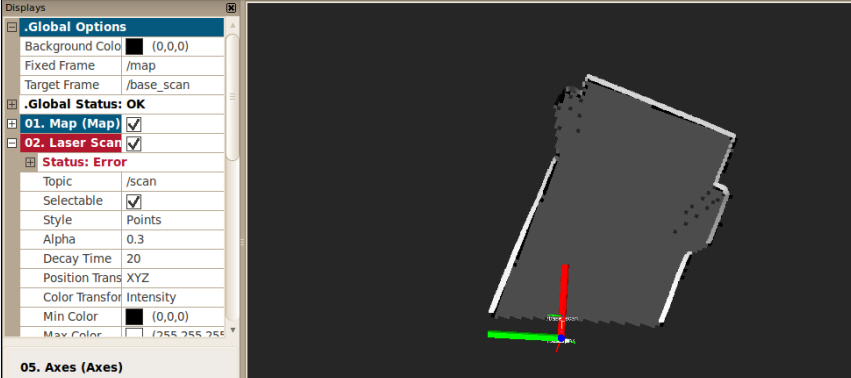
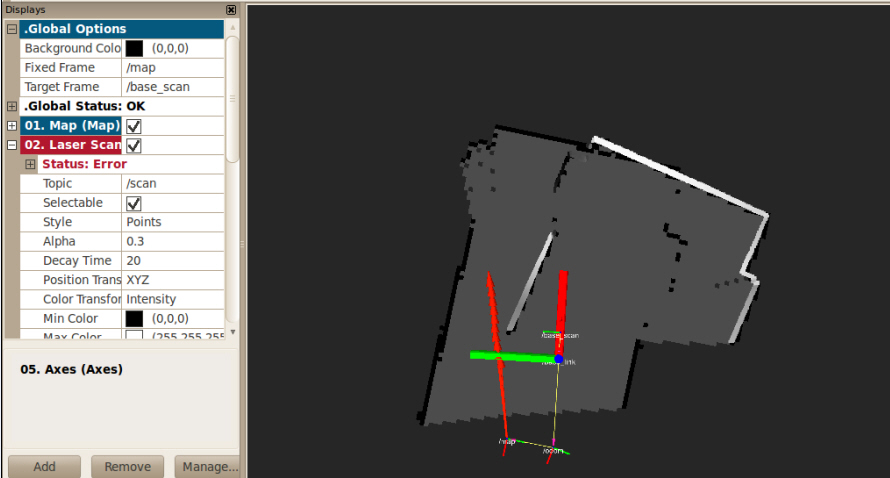
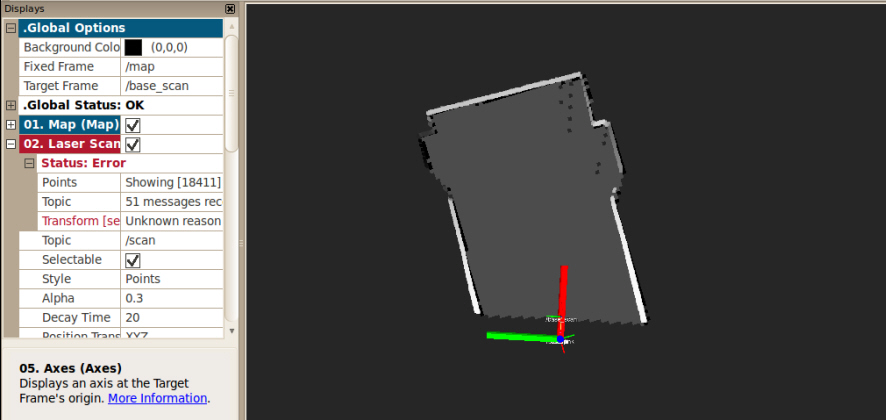
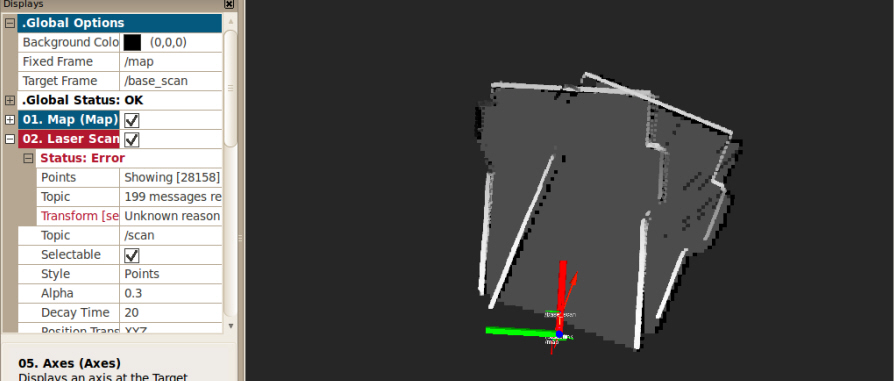
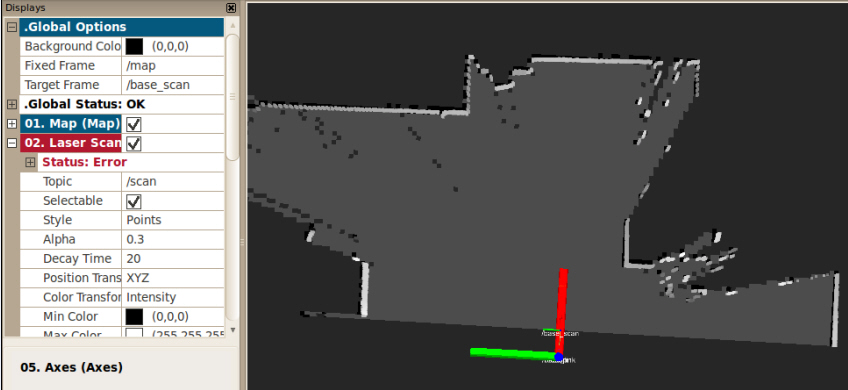
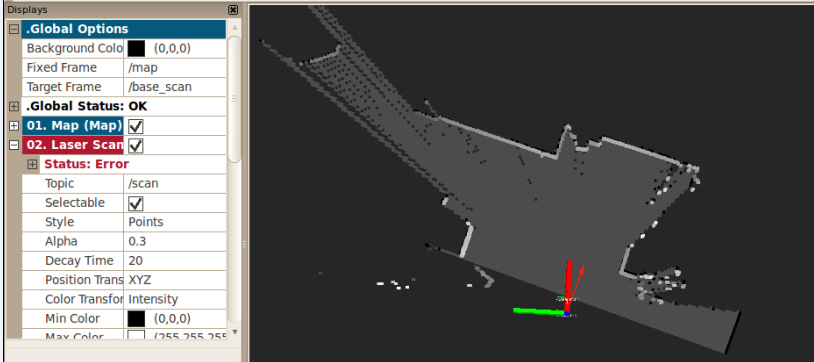
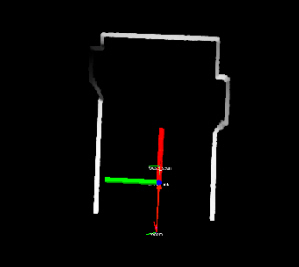
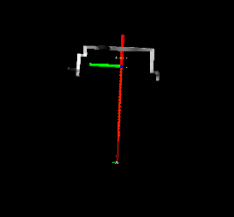
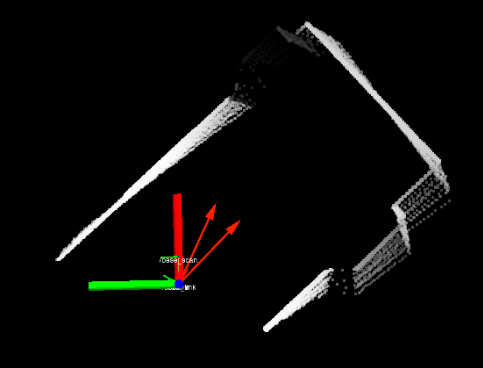
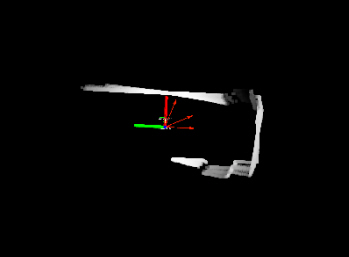
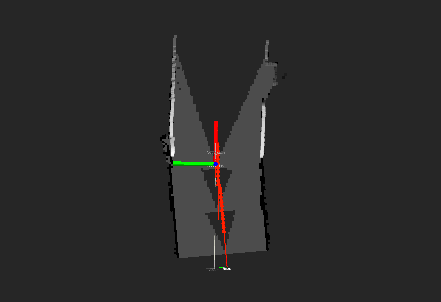
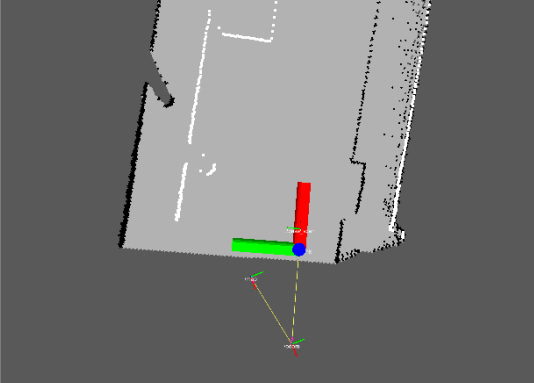
Hello everybody! This is a map in RVIZ.
we can see there is a shift from left to right in the map. The shift lead to a wrong result. I have been test the odometry data, it's ok. And the tf between /odom and /base_link is ok. Where would be the problem cause this wrong result?
Thank you for your attention.
add a comment